商机详情 -
格物斯坦开源工业级延展
格物斯坦开源系列的机械手臂的软件生态覆盖从图形化编程到工业级开发的完整路径:低门槛开发:通过GScratch软件(基于Scratch 2.0优化)拖拽“舵机角度”“视觉识别”等积木块,学生可快速实现基础动作控制;软件支持一键将图形代码转译为Arduino C语言,降低高阶开发的学习曲线。高阶智能融合:结合ROS框架,机械手臂可运行多模态AI任务。例如集成YOLO目标检测模型实现动态分拣(如物流包裹分类),或通过强化学习算法优化抓取路径,在工业分拣场景中达到毫米级操作精度。仿真与现实协同:依托“格物”具身智能仿真平台,学生可先在虚拟环境中预演机械臂运动策略(如抗扰控制、负载优化),再部署至实体硬件验证。例如在模拟八级强风环境中测试动态平衡,或验证50公斤负重下的结构稳定性,大幅压缩研发周期。创客教育开源范式:工业级精度支撑教育级容错。格物斯坦开源工业级延展
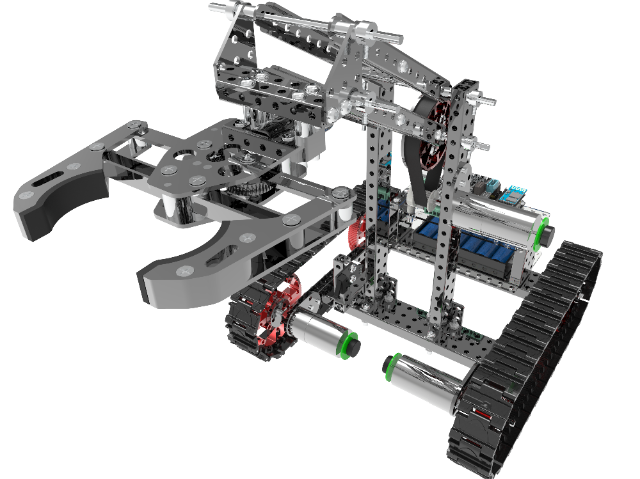
开源课程以C/C++语言为重点,学生从流程图设计入手,逐步进阶至工业级代码开发。课程通过GLP图形化软件实现编程逻辑的可视化过渡——例如拖拽“舵机角度”“环境光强度”等积木块生成控制指令,并一键转译为Arduino代码,降低高阶语言的学习门槛。在高级阶段,学生需编写算法控制多自由度系统,如为“螳螂机器人”设计捕食逻辑:通过陀螺仪数据检测身体倾斜度,结合超声测距触发机械臂抓取动作,实现仿生行为的动态响应。课程导向复杂系统的原型开发,如“颜色分类系统”需融合OpenCV视觉识别与机械臂控制,通过YOLO模型区分物体颜色并指挥分拣机构完成毫米级操作;“柔性制造流水线”则需协调传送带电机、机械爪与红外计数模块,模拟工业自动化流程。这些项目不仅要求学生贯通机械动力学与传感技术,更需运用工程迭代思维——在“格物”仿真平台预演抗强风、高负载场景,再通过示波器监测实体硬件运行参数,优化代码与结构设计,压缩研发周期。格物斯坦开源工业级延展GC-500控制器开源设计,兼容ROS生态调用运动控制API。
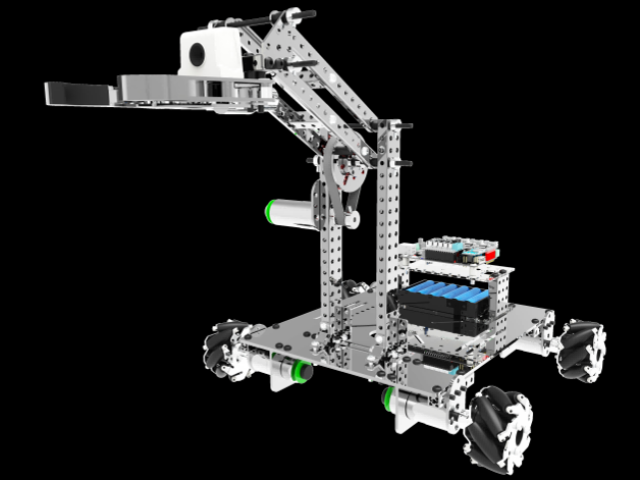
格物斯坦开源系列课程在低龄段(10-13岁) 以 Gbot机器人课程 为起点,学生通过36课时的项目实践,从Scratch图形化编程切入硬件交互。例如,在“螳螂机器人”项目中,学生需设计多关节机械结构,结合巡线传感器与超声模块实现动态避障;而“智能伸缩门”项目则要求学生运用限位开关与蓝牙模块,调试电机扭矩与齿轮传动系统,理解物理信号到数字指令的转换逻辑。课程同步引入 GScratch软件,支持图形化指令一键转译为Arduino C代码,为高阶开发架设桥梁。
格物斯坦的物理量传感器以动态感知为重点,包括:力学感知模块:如荷重传感器、应变加速度传感器,可测量0.1-50kg范围内的压力变化,精度达满量程±0.05%,用于机械臂抓取力控制或摩天轮承重实验;空间定位单元:超声测距传感器、巡线传感器,构成机器人避障与路径规划的基础;运动状态器件:陀螺仪与加速度计融合模块,支撑仿生机器人的动态平衡控制。环境量传感器则聚焦跨学科场景融合:光敏传感器基于光导效应,支持环境光强分级(如0-1000lux分档),应用于智能灯控系统与植物生长监测;温湿度复合传感器采用陶瓷湿敏电容与扩散硅技术,温度范围-30℃~70℃,湿度检测精度±3%,用于农业温室自动调控项目;气敏组件如MQN型气敏电阻,可检测CO₂、甲烷等气体浓度,结合TiO₂氧浓度传感器,成为环保监测机器人的重点。生物信号传感器体现技术普惠:脑电波模块通过专注力阈值触发指令,将α波强度转化为机器人速度参数,应用于特殊儿童康复训练;表情面板集成LED阵列与触摸感应,支持情绪化人机交互。“悬崖勒马”项目调试红外传感器,编写舵机急停逻辑应对边缘风险。
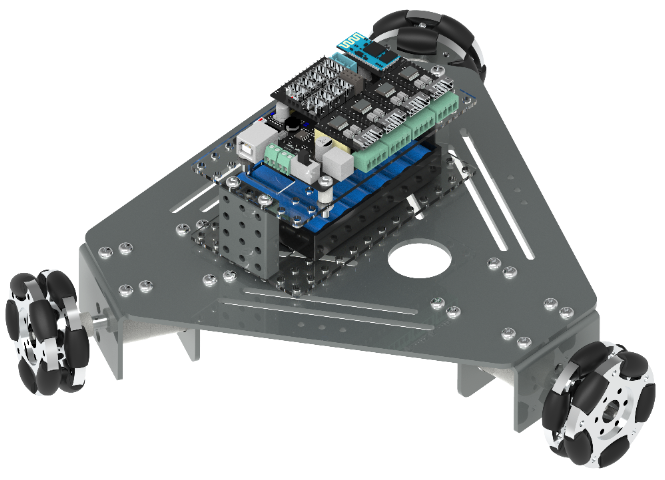
格物斯坦开源系列的传感器与执行器拥有多模态感知:集成超声测距、巡线传感器、红外遥控模块,部分型号配备表情面板实现人机交互。高精度舵机:扭矩范围0.15-20kg·cm,支持位置反馈与动态调参,满足仿生机器人关节精细控制需求。扩展接口:提供I²C、UART、GPIO等接口,兼容第三方传感器(如温湿度、光敏)及执行器(如气动机械爪)。格物斯坦金属开源机器人系列以工业级精度硬件(0.01mm公差)+全栈式编程生态(图形化至ROS)为主,覆盖从K12工程启蒙到高校科研的全链条需求。其技术参数强调扩展性与兼容性,教学场景则深度融合跨学科问题解决与真实社会议题,真正践行“让创造没有围墙”的开源精神。 开源硬件可接入Python/C++编写的工业级算法,衔接高等教育需求。格物斯坦开源工业级延展
企业基于其硬件二次开发,将机械臂原型研发从500万压缩至5天。格物斯坦开源工业级延展
开源课程的优势在于 “产学研赛一体化”生态:工具链贯通:从图形化编程(GScratch)到工业级开发(ROS/Arduino),学生可在“格物”仿真平台预演算法(如抗强风机械臂运动策略),再部署至实体硬件验证,压缩研发周期;场景化创新:课程嵌入真实社会议题,如山区学生开发“智能浇花系统”,通过土壤湿度传感器触发机械臂灌溉指令,或参与IRM国际机器人创客大赛,设计火源定位误差小于2米的林火监测无人机;开源社区协作:OpenLoong平台共享3D模型与代码库(如“全自动象棋机器人”方案),学生可复用成熟模块聚焦功能优化,而企业如优必选、宇树科技亦基于其硬件架构二次开发,将传统需500万元投入的机械臂原型压缩至单人5天完成。格物斯坦开源工业级延展