-

 陕西航空航天控制算法定制开发
发布时间:2026.06.29
陕西航空航天控制算法定制开发
发布时间:2026.06.29
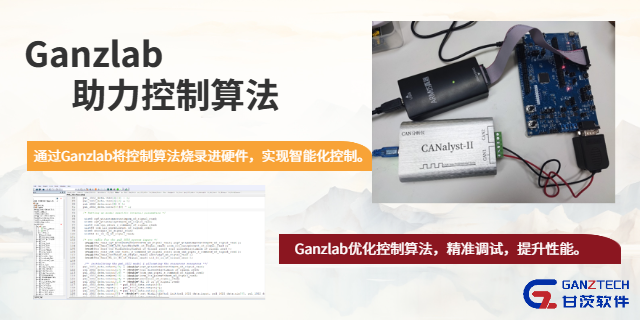
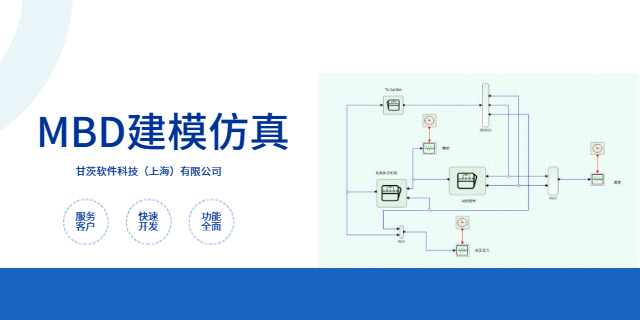
开发光伏逆变器、风电变桨、微电网能量调度这类新能源控制算法,完成仿真验证后,需要把算法模型转换成可嵌入式运行的代码,手动编写代码不*效率低,还容易出现错误,自动代码生成工具能直接从仿真模型生成可运行的...
-
 陕西半实物汽车仿真平台试用
发布时间:2026.06.29
陕西半实物汽车仿真平台试用
发布时间:2026.06.29
新能源汽车的三电系统开发,需要在控制器开发早期就接入实时仿真测试。HIL 仿真可以提前验证控制逻辑的正确性,减少实车测试环节暴露的问题,降低整体开发风险,压缩整个三电系统的开发周期,更好适配新能源汽车...
-
 上海电机控制算法软件
发布时间:2026.06.29
上海电机控制算法软件
发布时间:2026.06.29
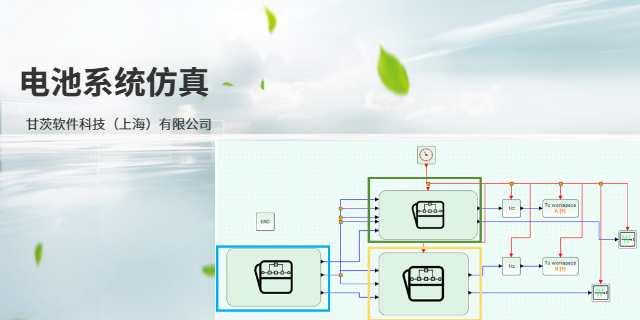
新能源汽车和储能设备的是电池管理系统,电池控制算法的精度和可靠性直接影响电池的使用寿命和使用安全,算法落地前必须经过多轮验证,覆盖不同工况、不同环境温度、不同充放电倍率场景,确保算法在各类极端条件下都...
-
 湖北有限元汽车仿真平台试用
发布时间:2026.06.28
湖北有限元汽车仿真平台试用
发布时间:2026.06.28
自动驾驶算法开发需要大量不同场景的测试,完全依靠实车测试不但成本高,还很难覆盖极端危险场景。使用仿真软件搭建虚拟仿真测试场景,可以无限复现各类工况,完成百万公里级的测试,帮助团队更快验证自动驾驶的感知...
-
 高性能控制算法代码生成
发布时间:2026.06.28
高性能控制算法代码生成
发布时间:2026.06.28
汽车行业向软件定义方向转型,AUTOSAR标准已经成为汽车控制算法开发的通用规范,不少刚进入汽车控制领域的工程师,还有需要完成团队技术升级的开发团队,都需要专业的体系化培训,掌握符合AUTOSAR标准...
-
 山东概念设计汽车仿真机器学习
发布时间:2026.06.28
山东概念设计汽车仿真机器学习
发布时间:2026.06.28
燃料电池汽车动力系统结构复杂,包含燃料电池堆、氢气供给系统、动力蓄电池、驱动电机等多个部件,开发过程中需要提前验证控制策略的可靠性。模型在环仿真可以把各个子系统的高精度模型接入仿真环境,在开发早期验证...
-
 江苏有限元汽车仿真模型
发布时间:2026.06.28
江苏有限元汽车仿真模型
发布时间:2026.06.28
汽车仿真模型的参数直接影响仿真结果的精度,参数辨识就是通过实测数据调整模型参数,让模型输出贴近实际车辆的响应。传统本地参数辨识需要消耗大量本地算力,大尺寸模型的辨识过程耗时久。云端架构能调用云端大规模...
-
山东航空航天控制算法模型在环
发布时间:2026.06.27
鲁棒控制算法可以应对被控对象的参数波动和外部干扰,提升控制系统的稳定性,在很多工业场景都有大量应用。不少高校科研团队和中小企业开发团队,都希望能获得可靠的开源鲁棒控制算法资源,降低前期研发的门槛,快速...
-
 江苏自主可控汽车仿真测试
发布时间:2026.06.27
江苏自主可控汽车仿真测试
发布时间:2026.06.27
汽车开发中,标定匹配环节需要连贯完整的工具链支撑,才能快速完成不同模块的对接调试,保证仿真结果准确贴合实车表现。传统工具链往往存在不同模块兼容性差、数据对接不通畅的问题,拖慢标定匹配的进度,也增加了额...
-
 上海神经网络控制算法选型指南
发布时间:2026.06.27
上海神经网络控制算法选型指南
发布时间:2026.06.27
鲁棒控制算法擅长处理被控对象存在参数扰动、模型不确定的场景,在新能源变桨控制、自动驾驶动力系统控制等领域应用越来越多。MIL也就是模型在环测试,是鲁棒控制算法开发早期验证的关键环节,可以在实车或者实物...
-
陕西运动控制算法软件在环
发布时间:2026.06.26
控制算法开发完成后,硬件在环测试是算法落地前必不可少的环节,可以模拟实际被控对象的运行状态,对控制算法的实时性、可靠性做测试,提前暴露算法在实际运行中可能出现的问题,提升算法落地的成功率,减少现场调试...
-
 陕西多体动力学汽车仿真咨询服务
发布时间:2026.06.26
陕西多体动力学汽车仿真咨询服务
发布时间:2026.06.26
汽车仿真完成后会产生大量的仿真数据,需要对数据进行清洗、整理、分析、可视化,提取能够支撑设计优化的结论。高性能仿真数据后处理可以快速处理大容量仿真数据,支持多维度的数据对比分析,输出直观的可视化结果,...
-
 山东标定匹配汽车仿真模型在环
发布时间:2026.06.26
山东标定匹配汽车仿真模型在环
发布时间:2026.06.26
海外商用仿真软件采购和维护成本逐年升高,授权限制多,很多使用规则不符合国内车企的开发需求。不少国内车企和科研机构开始寻找成熟可靠的替代方案,用成熟国产工具替代 MATLAB 做汽车仿真,既可以降低长期...
-
北京国六汽车仿真机器学习
发布时间:2026.06.26
很多车企现有研发流程已经基于 MATLAB 搭建完成,更换仿真工具关注工具兼容性,也希望能拿到清晰透明的报价方案,匹配自身的研发预算。成熟稳定的兼容方案可以减少现有模型迁移的工作量,降低工具切换的整体...
-
 PID控制算法软件
发布时间:2026.06.26
PID控制算法软件
发布时间:2026.06.26
工业自动化领域的控制算法,直接影响生产线的运行效率和产品稳定性,正式上线前需要完成多工况、全流程的测试,提前暴露算法缺陷,避免上线后出现生产事故。控制算法测试需要模拟工业现场的各类干扰和异常工况,验证...
-
 广东AUTOSAR控制算法模块
发布时间:2026.06.26
广东AUTOSAR控制算法模块
发布时间:2026.06.26
软件在环(SIL)开发是控制算法开发流程早期阶段的环节。在完成算法逻辑设计后,把算法放到计算机仿真环境中运行,和被控对象的仿真模型联动,验证算法整体功能和逻辑的正确性,提前发现设计阶段的错误,减少后续...
-
 天津控制算法模型在环
发布时间:2026.06.26
天津控制算法模型在环
发布时间:2026.06.26
滑模控制凭借出色的鲁棒性,成为各类非线性被控对象控制策略设计的常用方案。研发人员调试滑模控制算法,需要配套工具完成建模、调试、仿真验证,减少重复开发基础模块的工作量。成熟的工具箱可提供现成的趋近律设计...
-
浙江详细设计汽车仿真参数辨识
发布时间:2026.06.25
软件在环仿真是汽车控制算法开发过程中的环节,可以在硬件样件完成前,完成软件功能的初步验证,帮助开发团队提前发现算法逻辑漏洞,提升开发效率。海外工具的供应链不稳定,授权成本高,很多本土车企都在推进工具链...
-
安徽混合动力汽车仿真优化
发布时间:2026.06.25
汽车仿真完成后会产生大量的仿真数据,需要对数据进行清洗、整理、分析、可视化,提取能够支撑设计优化的结论。高性能仿真数据后处理可以快速处理大容量仿真数据,支持多维度的数据对比分析,输出直观的可视化结果,...
-
 陕西国产控制算法工具
发布时间:2026.06.25
陕西国产控制算法工具
发布时间:2026.06.25
控制算法的参数整定直接影响控制效果,传统整定方法依赖研发人员的经验,复杂多变量系统的整定耗时长,很难得到适配参数组合。AI驱动的控制算法整定,可以依靠智能算法自动搜索适配参数组合,快速完成多目标优化,...
-
有限元汽车仿真建模
发布时间:2026.06.25
汽车研发中做有限元仿真,很多团队会关心报价相关的内容,不同的服务模式、工具授权方式,价格差异较大。按需选择对应的服务或授权,可以控制研发成本,匹配项目预算要求。不管是一次性的有限元仿真验证服务,还是长...
-
 山东云端汽车仿真模型在环
发布时间:2026.06.25
山东云端汽车仿真模型在环
发布时间:2026.06.25
自动驾驶算法开发需要覆盖大量不同场景的测试,靠实车测试积累场景数据效率太低,测试成本居高不下,还没办法覆盖所有低概率危险工况。通过高保真仿真建模搭建虚拟测试场景,可以快速完成大量场景的算法测试,加速自...
-
广东预测控制算法建模
发布时间:2026.06.25
鲁棒控制算法擅长处理被控对象存在参数扰动、模型不确定的场景,在新能源变桨控制、自动驾驶动力系统控制等领域应用越来越多。MIL也就是模型在环测试,是鲁棒控制算法开发早期验证的关键环节,可以在实车或者实物...
-
浙江PID控制算法开源
发布时间:2026.06.25
电机控制算法直接影响电机运行的效率、精度与稳定性,算法开发完成后,需要通过硬件在环(HIL)测试验证算法在实际硬件环境下的运行效果,提前发现算法与硬件匹配的问题,减少实机测试的成本与风险。HIL测试需...
-
湖北模糊控制算法入门
发布时间:2026.06.25
在控制算法开发过程中,合理使用成熟的开源模块可以减少重复开发工作,压缩研发周期,降低开发成本。选择开源模块需要关注模块的维护状态、文档完整性,还有License协议是否符合商业项目的要求。很多基础的控...
-
 重庆实时控制算法优化
发布时间:2026.06.25
重庆实时控制算法优化
发布时间:2026.06.25
很多研发团队已经在MATLAB中完成控制算法模型搭建,切换开发工具的过程中,不需要重复建模,兼容已有MATLAB控制算法模型的在环测试,能帮助团队平滑完成工具切换,减少迁移成本,保护已有研发成果。模型...
-
浙江参数化汽车仿真平台
发布时间:2026.06.25
国内汽车产业转型升级进入深水区,工业软件自主可控成为全行业共识。汽车仿真作为整车开发的工具,长期依赖海外产品,不但整体采购和维护成本高,还存在潜在的数据安全风险,适配国内车企开发流程的本地化支持也存在...
-
安徽自主可控汽车仿真验证
发布时间:2026.06.24
模型在环仿真 MIL 是汽车控制算法开发早期的环节,可扩展的 MIL 仿真框架,能随着开发进度逐步添加新的模块,完善模型的复杂度,从单个控制算法的验证逐步扩展到整车级的联合仿真,满足不同开发阶段的需求...
-
上海可扩展汽车仿真模型
发布时间:2026.06.24
汽车研发团队开展仿真工作,第一步就是做好技术选型,选型要匹配项目的研发阶段、团队的技术基础、预算等多个因素,选错工具会直接拖慢项目进度,增加额外的开发成本。选型阶段需要考虑工具的兼容性、可扩展性、后续...
-
江苏动力总成汽车仿真深度学习
发布时间:2026.06.24
汽车开发中,标定匹配环节需要连贯完整的工具链支撑,才能快速完成不同模块的对接调试,保证仿真结果准确贴合实车表现。传统工具链往往存在不同模块兼容性差、数据对接不通畅的问题,拖慢标定匹配的进度,也增加了额...