商机详情 -
天津堆焊电源
宝利苏迪自动堆焊机器人设备可用于接管内壁堆焊,管子表面堆焊,端面堆焊,该自动堆焊设备采用机器人将TIG焊堆焊机头送至指定位置,采用编程控制或根据待焊工件的形状自主规划堆焊路径,机器人可实现回转、直道及摆动焊接,可实现接管内壁环向规则区域、不规则区域、对称区域及非对称区域的堆焊,可实现接管端面,表面的堆焊及筒体外壁堆焊。自动堆焊机器人的操作及运转空间能满足典型工件操作工位的要求,堆焊机器人活动轴不少于6轴。自动堆焊机器人的控制系统具有安全功能,具有紧急停止,自动模式停止,测试模式停止等。机器人具有监控系统,主要包括堆焊机器人本体和堆焊设备监控。宝利苏迪堆焊机器人采用六轴工业机器人,搭配操作架,能够精确定位焊枪位置,实现任意位置的管板平面堆焊。天津堆焊电源
宝利苏迪自动堆焊设备可用于平板堆焊,焊接机头和十字滑块安装在焊接操作机上,通过焊接机头在十字滑块上的行走实现平板表面的堆焊。宝利苏迪自动氩弧堆焊设备可用于接管内壁和拐角堆焊。焊接位置为平焊位置或横焊位置。将工件装卡在变位机工作平台上。焊接机头安装在操作机上,焊接机头固定不动,通过变位机平台的旋转来完成堆焊。堆焊机头配有自动行走机构,通过程序控制,自动进道。工件材质:碳钢,低合金钢,堆焊材料:不锈钢,镍基合金。湖北自动端面堆焊宝利苏迪管板耐腐蚀堆焊设备由焊接机头,电源,机器人,操作架,地轨,回转台,焊缝激光清洗设备组成。

AVC滑块、OSC滑块具有特殊的重要性,因为它们直接干预焊接过程控制。AVC装置由动力滑块、测量系统和闭环调节系统组成。系统需要检测焊炬(靠近钨极处)的电弧电压,以限制线束长度产生的线路损耗影响。AVC的工作原理是基于电弧高度和产生的电压值之间的直接关系(特定电流值情况下)。在正常工作范围内(氩气保护下焊接,电流30A以上),AVC克服了所有的不规则性,确保电弧特性的恒定,从而增强了焊珠的规律性。各种相关功能有助于更精细地控制AVC滑块的反应,使其更具反应性,抑制其运动或延迟对焊缝池的影响。此外,AVC滑块的运动在焊接程序中进行编程,并与焊接电流同步。
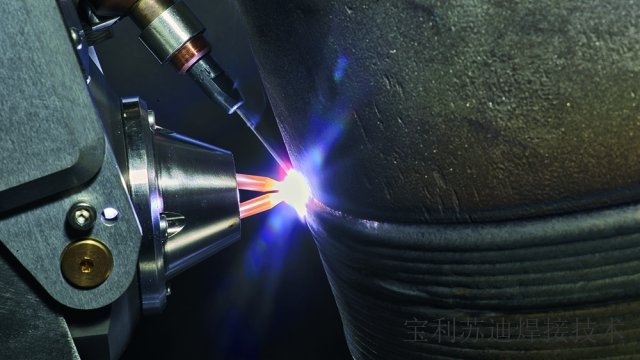
堆焊中的熔敷率是除稀释率外另一个衡量焊接工艺性能的关键参数,反映的是金属沉积效率。焊接速度影响能量输入和焊道形状。在其他参数保持不变的情况下,焊接速度的增加会减小焊道宽度,熔池和母材之间的接界区域也会减小。另外,焊接速度的增加,会改变焊缝成型,在熔敷率恒定的情况下,熔敷层会变厚。与焊接速度一样,焊接电流影响能量输入。高电流确保熔敷率的优化。直流焊接有利于增加焊接速度和熔敷率。脉冲电流要求更适中的焊接速度。电流调节限于维持熔池和调节焊道形状。恒定能量下,脉冲电流焊接可用于增加焊道宽度。宝利苏迪热丝TIG堆焊焊枪包括钨棒和夹具,冷却水管路,气体管路以及保护气喷嘴。

这是一种在圆柱形零件或缸体上执行堆焊操作的传统机器配置。根据所使用的焊炬,可以在孔的外表面或内壁上进行焊接。这种配置趋于理想,可以在效率(熔敷率)和稀释率之间找到比较好折衷点。工件被定位并夹持在转台或变位机上。待堆焊表面必须与工作台的旋转轴同心。焊枪安装在一组十字滑块上(AVC和OSC摆动),滑块行程可根据待焊工件的尺寸调整。如果是深孔堆焊,自动堆焊设备必须有能力支撑2.5m长的堆焊焊枪和相当或比焊枪行程更大的垂直滑块。宝利苏迪双金属复合管TIG内焊设备可用于长管内壁防腐材料复合层纵缝堆焊拼接。黑龙江弯头堆焊机头
自动氩弧堆焊、自动TIG堆焊可应用于维修损坏部件,防磨防腐蚀层生产,增加隔离层作用。天津堆焊电源
TIG焊接电源是自动氩弧堆焊设备的心脏。通过人机界面,Polysoude的多功能,计算机可编程焊接电源可用于精确控制电流强度和运动。PC600-3堆焊焊接电源采用模块化优化设计,性能稳定,抗干扰能力强。焊接主电源,热丝电源,控制系统,气体保护系统采用整体设计,集成于一体,并通过欧盟关于焊接设备的设计、制造、维护及安全性能的检测,保证了应用的稳定性,焊接过程的可重复性及维护的便利性。自动氩弧堆焊电源PC600-3可控制轴:电流轴,机头运动轴,送丝轴,AVC弧长跟踪轴,摆动轴,供电轴,多功能轴等,可实现对焊接所有参数的控制以及对外部设备的联动控制功能。天津堆焊电源