商机详情 -
江苏自动管件堆焊
宝利苏迪耐腐蚀堆焊机器人采用工件回转的方式,以及双钨极热丝TIG焊的焊接工艺,堆焊管板大平面,管板其他区域。焊接位置1G和2G。堆焊材料:不锈钢或镍基合金。该套耐腐蚀堆焊机器人,具有完整软件包,与数字化焊机通讯良好,可控性好。机器人遥控盒使用界面人性化,方便焊接参数设置与调试。机器人运动范围和区域满足工件全部焊缝的焊接要求。机器人远程监控包括机器人主体和焊机状态监控。使用寿命可达15年。工作站的气路水路管道设计合理,机器人动作时不发生缠绕干涉。监测观察系统由摄像系统和成像显示系统等组成。管子内壁堆焊配置此套系统实时观察焊接过程。江苏自动管件堆焊

宝利苏迪TIG钨极氩弧堆焊设备可以对精确参数进行编程:堆焊速度、电流、电压、送丝速度和预热温度,可以更好地控制稀释率,从而保证熔敷物的正确化学成分。TIG自动钨极氩弧堆焊的可实现全位置焊,来处理不适合平焊位置的工件。TIG管道氩弧堆焊由于工艺的灵活性,可以选择在非常宽的能量范围内工作,焊接电流调节范围广。可选择多焊炬或多送丝机构来实现生产力的提高,且不会影响操作性和熔敷质量。在TIG自动钨极氩弧堆焊中,TIG焊的所有常规功能仍然完全适用(AVC,摆动,与焊接电流同步运动等)。河南自动法兰堆焊单元宝利苏迪机头导向钢丝绳用于承托12米焊炬深入焊管,并为焊炬在管内提供导向作用。

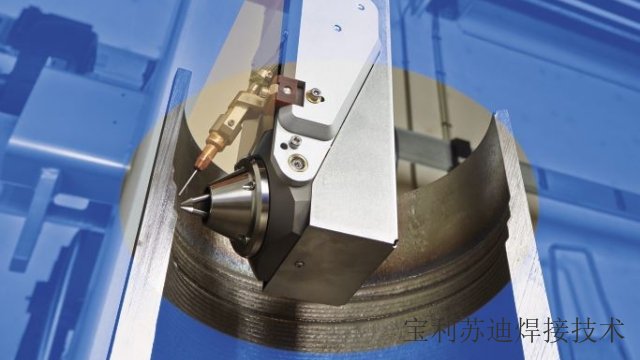
宝利苏迪POLYSOUDE自动堆焊机头安装于堆焊机器人端部法兰,由堆焊焊枪,送丝机构,焊枪水气接口板,线束组成。焊枪满足电流容量大,并具有热丝功能。钨极与焊丝之间距离可调。堆焊母材:碳钢或合金钢。填充焊丝:不锈钢焊丝或镍基合金焊丝,低合金焊丝。焊丝直径:1.0mm,1.2mm。钨极尺寸:4.0mm。焊接机头上配有角度调节板,可在0-45度范围内将焊枪从横焊调整至斜向下45度,便于堆焊接管内台阶处的角焊缝。焊接机头具有送丝机构,包括送丝点击,焊丝盘支架,送丝导管,热丝导电杆,导丝嘴等。送丝机构的送丝嘴具有合适的角度,保证焊丝能够顺畅地送入熔池中,送丝顺畅有力,速度无极可调。
由于其配置,这些机头固定工件旋转的堆焊设备相对通用,可以执行与旋转机头相同的平面位置堆焊操作。内孔底部堆焊,内壁堆焊,拐角堆焊分别选用不同角度的堆焊焊炬。焊炬可配有一路或两路送丝,倾斜角度可调节。对于小直径孔,可提供带集成摄像头的冷丝TIG焊接解决方案。焊炬水冷,可承受层间温度。在一些更极端的应用中,或者是由于堆焊形状(长方形),或者是工件的几何特性(1至2米深孔),经常使用混合方案。宝利苏迪POLYSOUDE无限回转机头通过十字滑块悬挂在操作机端部,同时工件配有回转平台,这样可以提供更高灵活度。宝利苏迪可提供水平堆焊设备,包括工件旋转或焊炬旋转水平堆焊设备。
在焊接之外,AVC滑块用于焊枪定位或准备起弧。自动焊接的第一步是通过AVC滑动运动使电极接触工件。接触点是通过电极和工件之间的闭合回路来检测的。摆动滑块,在较少情况下用于焊接前的定位,只有当需要一个或两个参考边时才需要(例如,在凹槽中心定位或相对于参考面进行定位)。在焊接过程中,摆动滑块可能与焊接电流同步进行振荡运动,或使轨迹被重置或偏移(例如步进)。摆动功能需保证摆动的高精度和高稳定性,可以和焊接电流脉冲同步运动来保证厚壁情况下的侧壁熔合,支持对填充及盖面情况多种摆动模式控制。宝利苏迪堆焊机器人具有监控系统,包括机器人本体和焊机状态监控。河北自动管道堆焊机
宝利苏迪智能机器人TIG堆焊设备可用于接管内壁,端面堆焊。机器人将堆焊机头送到指定位置完成堆焊动作。江苏自动管件堆焊
AVC的工作原理是闭环电压调节。对于相同的焊接条件,一个给定的电压对应一个电弧高度。电压和电弧高度之间的对应关系要求钨极(作为测量仪器)保持完美状态。钨极被用作测量传感器,这意味着,如果钨极磨损,不仅电弧柱会被影响,而且会改变钨极与工件距离和参考电压之间的初始设定关系。有几种情况可能会导致电弧高度的变化:钨极磨削角度的变化;钨极污染;不正常的过热(冷却问题或尺寸不正确)。因此,观察可以揭示许多可能的AVC不稳定性。江苏自动管件堆焊