商机详情 -
广西端面堆焊机头
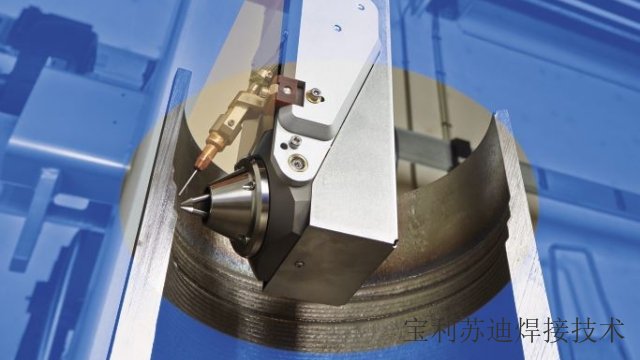
宝利苏迪Twin-TIGer双矩双钨极焊枪结构完全不同于普通TIG焊枪,焊枪内部包括两个TIGer焊炬,每个焊炬又有两个钨极并分别有各自的保护气体,在每个TIGer焊枪后部分分别集成有AVC模块和摄像头模块。焊枪整体经过优化设计,大大减小了焊枪的尺寸。适用焊丝直径:dia1.2mm。可焊工件内径:大于等于140mm。暂载率:400A@100%。TIGer双钨极与传统TIG焊接技术的比较大区别在于,一把焊炬内包含两个钨极,通过一主一从两个焊接逆变联动控制两个钨极产生的复合焊接电弧。双钨极堆焊焊枪的电流容量大,并具有热丝功能,焊接效率极高。焊炬和矩体设有水冷循环系统,强制水冷,提高工作稳定性。宝利苏迪长管纵缝堆焊设备,焊枪由钢丝绳导向,由机头行走机构推拉进出管子完成纵缝焊接。广西端面堆焊机头

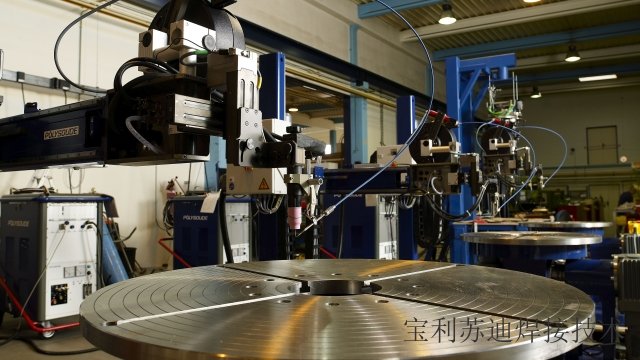
TIG堆焊电源PC600-3控制系统包括微处理器、6轴控制模块,控制柜,各种控制接口,内置标准程序和操作系统,PC电脑接口和打印机接口等。通过控制面板和与焊接设备相连的PC电脑,整套焊接设备的控制系统能够对所有参数和动作进行编程控制、实时监控和编程范围内的超驰控制。界面显示设备:包括遥控器和PC,其中的显示系统包括电源上的电流电压表,控制柜电脑屏幕显示,遥控器上的液晶屏幕和PC屏幕,可以将焊接过程中的主要参数实时显示:焊接电流,电弧电压,程序标号,执行时间,焊枪位置等。广西端面堆焊机头宝利苏迪管板耐腐蚀堆焊设备由焊接机头,电源,机器人,操作架,地轨,回转台,焊缝激光清洗设备组成。
宝利苏迪自动氩弧堆焊设备可用于蒸发器、换热器管板耐腐蚀堆焊。该耐腐蚀堆焊设备,管板堆焊机器人设备包含焊接机头,电源,机器人,操作架,地轨,会转台以及焊缝激光清洗设备。水平回转台可参与机器人编程联动。堆焊机器人采用六轴工业机器人,搭配操作架,能精确定位焊枪位置,实现任意位置的焊接堆焊。该堆焊设备配备了智能焊接系统,熔池检测系统,焊缝清理系统及集中控制系统。焊接方法:双钨极热丝TIG焊。堆焊材料:不锈钢或镍基合金。
在焊接之外,AVC滑块用于焊枪定位或准备起弧。自动焊接的第一步是通过AVC滑动运动使电极接触工件。接触点是通过电极和工件之间的闭合回路来检测的。摆动滑块,在较少情况下用于焊接前的定位,只有当需要一个或两个参考边时才需要(例如,在凹槽中心定位或相对于参考面进行定位)。在焊接过程中,摆动滑块可能与焊接电流同步进行振荡运动,或使轨迹被重置或偏移(例如步进)。摆动功能需保证摆动的高精度和高稳定性,可以和焊接电流脉冲同步运动来保证厚壁情况下的侧壁熔合,支持对填充及盖面情况多种摆动模式控制。宝利苏迪堆焊机头包括焊枪升降、摆动机构、步进、角度调节机构,气路、水冷系统,操作盘、焊丝盘等。
用于固定工件水平位置焊接的自动氩弧堆焊设备通常包括:适当的工件支撑(工作台或支架)和一个配有端部接口的操作机(焊炬、AVC和摆动滑块、送丝装置和用于动力、流体和运动的电缆/线束)。此类应用中,工件是固定不动的,例如阀座部件的现场堆焊维修,由于阀门是固定不动的,所以水平堆焊设备需要安装固定在阀门上,配备宝利苏迪POLYSOUDESPX无限旋转机头,通过焊枪的圆周运动实现阀座阀门的现场堆焊修复,多层多道焊接。SPX机头内置一体化的无限回转机构具有焊接电流、热丝电流、系统接地、焊枪冷却水进出、焊枪保护气的无限制旋转过程的稳定动态连接和密封能力,同时实现电流、电弧电压、系统工作逻辑信号、送丝控制信号和焊接高清视频信号灯的无限制旋转过程的稳定连接,彻底解决全位置焊接中的线束缠绕问题,极大地提高了焊接生产效率,简化了设备结构和操作难度。宝利苏迪堆焊机器人具有监控系统,包括机器人本体和焊机状态监控。广西端面堆焊机头
宝利苏迪提供阀门堆焊、阀壳堆焊设备、弯头堆焊、弯管堆焊设备、法兰堆焊、管道堆焊设备、管件堆焊设备。广西端面堆焊机头
宝利苏迪自动堆焊设备焊接电源PC600-3包括逆变电源、TIGer输出控制模块、热丝模块和功能轴控制模块,为整个焊接系统提供水电气供应和各种控制信号的处理:焊接电流输出控制、热丝电流输出控制、控制焊枪AVC跟踪,摆动,送丝和联动配套设备驱动工件旋转等焊接动作,是整套系统的主要。输入电压:三相交流,输出焊接电流范围:5-550A。可控制轴:电流轴,机头运动轴,送丝轴,AVC电弧电压自动控制轴,摆动轴,供电轴,多功能轴等。内置程序数量:100个。编程方式:PC电脑,遥控器线长:15米。广西端面堆焊机头