新闻中心 - 上海诺尚信息技术有限公司
-
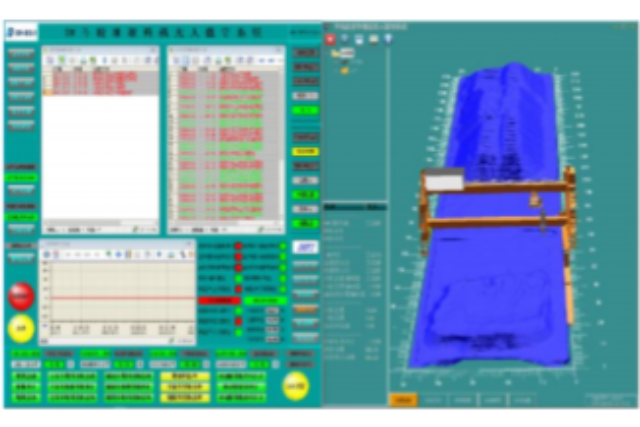 山西堆取料机无人值守系统燃煤电厂设定
山西堆取料机无人值守系统燃煤电厂设定散货堆场中的堆取料机无人值守系统依赖于PLC控制指令的准确传递与执行,这一环节在自动化作业中起着关键作用。PLC负责将上位机下达的作业任务转化为具体动作,确保堆取料机按计划完成堆料与取料过程。系统利用...
发布时间:2026.07.09 -
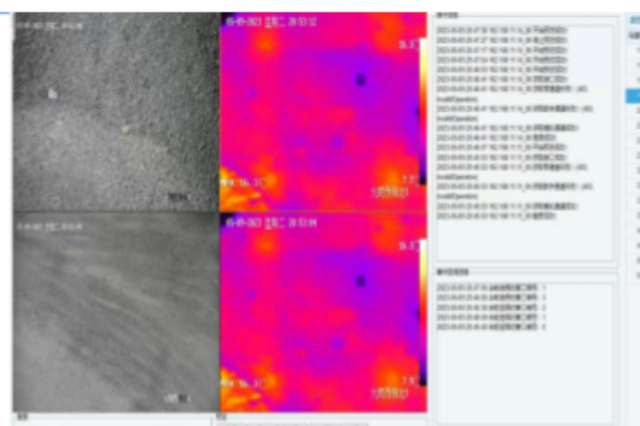 陕西工业安全监测系统煤场操作方法
陕西工业安全监测系统煤场操作方法明火煤的存在是许多工业场所的隐患之一,尤其是在煤炭运输和储存过程中,明火的产生可能导致严重的安全事故。明火煤工业安全监测系统通过红外测温技术,实时监控煤炭的温度变化,确保在温度异常升高时能够及时发出预...
发布时间:2026.07.08 -
 上海工业安全监测系统煤场实时监测
上海工业安全监测系统煤场实时监测堆取料机作为大型料场的主要设备,其安全性和稳定性直接影响到物料的存储和运输效率。工业安全监测系统在堆取料机上的应用显得尤为重要。通过该系统,企业可以实时监控设备的运行状态,包括机械部件的磨损情况、设备...
发布时间:2026.07.06 -
 河北堆取料机无人值守系统自动取料
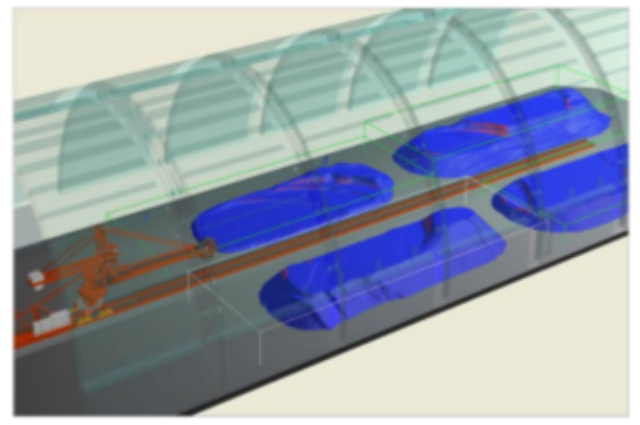
河北堆取料机无人值守系统自动取料刮板防撞堆取料机无人值守系统的实时扫描技术,是实现智能化作业的关键环节。该技术依托高精度激光扫描仪,对料堆进行扇形区域的快速扫描,捕获其三维形态及边界特征。激光扫描装置通常安装于取料机门架的高处两侧或...
发布时间:2026.07.05 -
 安徽性价比数字煤场管控系统
安徽性价比数字煤场管控系统选择适合的库存管理数字煤场管控系统是煤矿及大型燃煤电厂提升管理效率和安全水平的关键。理想的系统能够实现煤场信息的数字化和自动化管理,准确记录进煤、耗煤及存煤数据,保证数据更新及时且可靠。系统应支持根据...
发布时间:2026.07.04 -
 浙江安全巡检机器人廊道监控监控工作原理
浙江安全巡检机器人廊道监控监控工作原理气体盘煤巡检机器人系统以多传感器集成为基础,专门设计用于煤场环境中有害气体的监测与分析。该系统包括气体传感器模块,能够检测二氧化碳、六氟化硫等多种气体的浓度,配合温湿度传感器,实现对环境参数的动态感知...
发布时间:2026.07.03 -
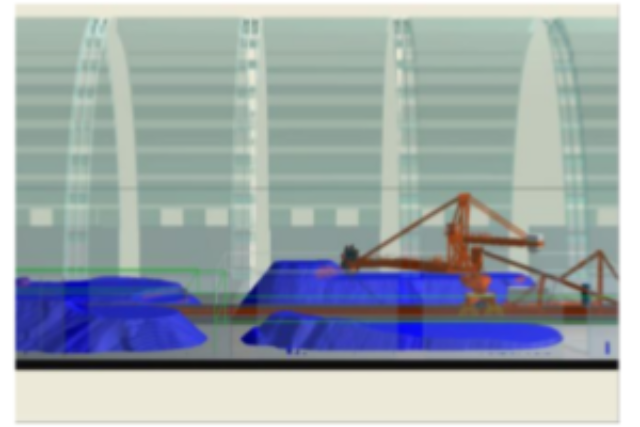
 山东堆取料机无人值守系统大型料场实时控制
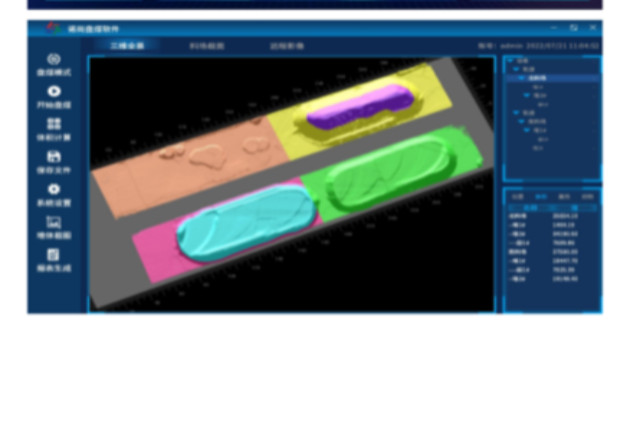
山东堆取料机无人值守系统大型料场实时控制大型料场的自动化堆取料作业对设备的安全性和运行效率提出了较高要求。安全防护堆取料机无人值守系统依托激光扫描技术,能够动态捕捉料堆的三维形态,进而将采集到的堆形数据发送至中控系统进行处理。主控PLC根据...
发布时间:2026.07.02 -
 吉林功率智能巡检系统
吉林功率智能巡检系统信号灯安全巡检机器人在智能巡检体系中承担着关键的自动识别与监控职能。其搭载的多类型传感器和高清摄像头,能够持续采集开关柜面板上的指示灯信号,准确反映设备运行状态,涵盖红外测温、局部放电检测及数显仪表读...
发布时间:2026.07.01 -
 广东智能巡检系统大数据分析多少钱
广东智能巡检系统大数据分析多少钱集成多种先进感知技术的柜面信号识别安全巡检机器人,为电力系统稳定运行提供了新的技术保障。柜面信号识别安全巡检机器人采用高清摄像头结合人工智能图像识别技术,能够自动捕捉开关柜内的指示灯、开关位置及仪表读...
发布时间:2026.06.29 -
 青海开发工业安全监测系统
青海开发工业安全监测系统高灵敏度工业安全监测系统的自动录像功能为企业的安全管理提供了重要的技术支持。该功能通过高清摄像头和智能分析算法,能够实时捕捉和记录生产现场的每一个细节。在安全事故发生时,录像资料不*为事故分析提供了详...
发布时间:2026.06.28 -
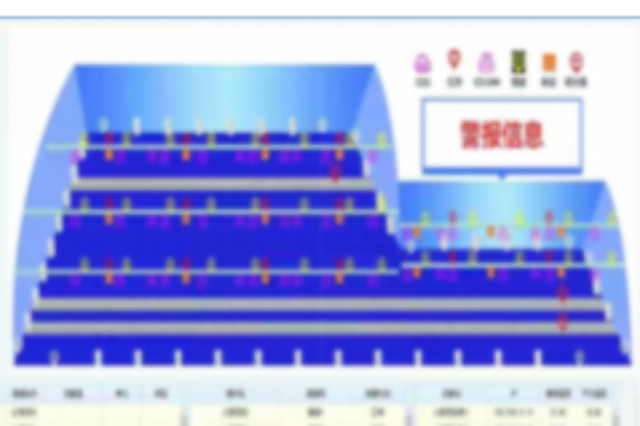
 河南数字煤场管控系统云端协同功能
河南数字煤场管控系统云端协同功能数字煤场管控系统由若干关键模块组成,各模块承担不同职能,协同促进煤场管理的智能化进程。系统关键部分包括三维激光盘煤系统、料场安全监测系统、数字化无人值守系统以及智能巡检系统。三维激光盘煤系统利用激光扫...
发布时间:2026.06.27 -
 上海工业安全监测系统挡煤墙温度
上海工业安全监测系统挡煤墙温度在现代工业环境中,自动监测系统的应用已成为保障安全的重要手段。工业安全监测系统通过在线监测技术,实现了全天候的环境数据采集和分析。该系统能够快速识别异常情况,如温度过高、气体泄漏或粉尘浓度超标,并在及...
发布时间:2026.06.25