新闻中心 - 上海诺尚信息技术有限公司
-
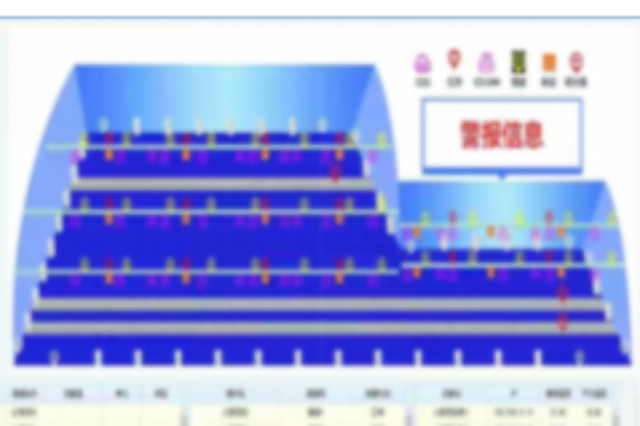
 河北工业安全监测系统煤场实时监测
河北工业安全监测系统煤场实时监测在工矿企业中,工业安全监测系统的PLC联机功能已成为提升生产安全与效率的重要工具。通过PLC联机,系统能够实现对各类传感器数据的实时采集与分析,确保了监测的准确性和及时性。工矿企业常面对恶劣的生产环境...
发布时间:2026.06.03 -
 江苏工业安全监测系统大型料场性价比
江苏工业安全监测系统大型料场性价比输煤集控室是煤矿和电力行业的重要枢纽,其安全运行直接影响到整个生产流程的顺畅。输煤集控室工业安全监测系统的自动寻检功能,通过智能化的传感器布局,实现了对集控室环境的全天候监控。系统能够自动识别潜在的安...
发布时间:2026.06.01 -
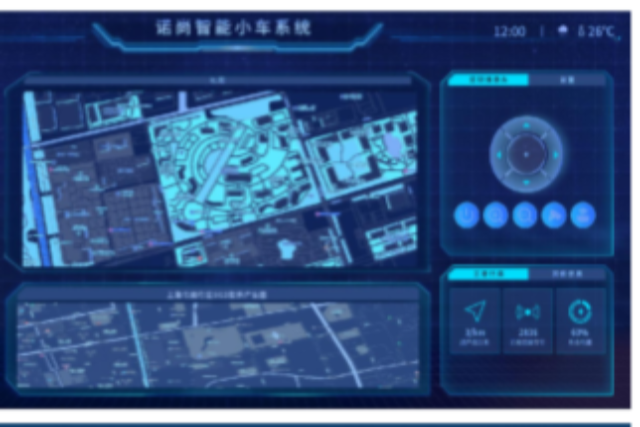 山西参数电气房轨道巡检机器人
山西参数电气房轨道巡检机器人煤矿室内环境中,设备布置复杂且空间有限,传统人工巡检常因环境限制而难以覆盖,且存在一定的安全隐患。室内轮式升降巡检机器人专为此类场景设计,能够在机房和继电室等区域实现灵活移动和多角度巡检。该机器人配备...
发布时间:2026.05.31 -
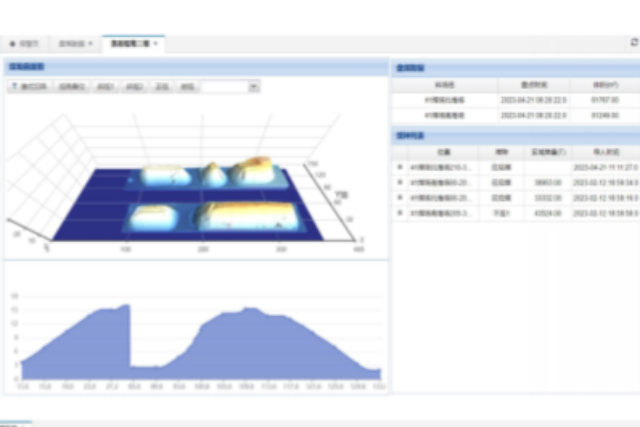 河北数字煤场管控系统燃煤电厂怎么用
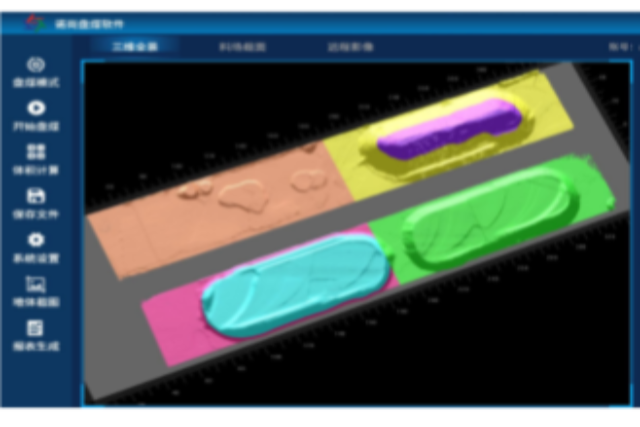
河北数字煤场管控系统燃煤电厂怎么用衡量煤矿生产数字煤场管控系统的性价比,需要综合考虑系统功能的完整性、运维效率及投资回报等多个方面。该系统融合三维激光盘煤技术和多维安全监测,实现煤场管理的自动化和信息化,降低人工盘点误差和安全隐患,从...
发布时间:2026.05.30 -
 河北智能巡检系统有毒气体检测数据采集
河北智能巡检系统有毒气体检测数据采集为应对继电保护屏柜信号人工巡检存在的效率与准确性挑战,保护装置信号识别安全巡检机器人提供了一种有效的技术手段。保护装置信号识别安全巡检机器人配备多种传感器,能够自动识别继电保护屏柜内的压板状态、空开位...
发布时间:2026.05.29 -
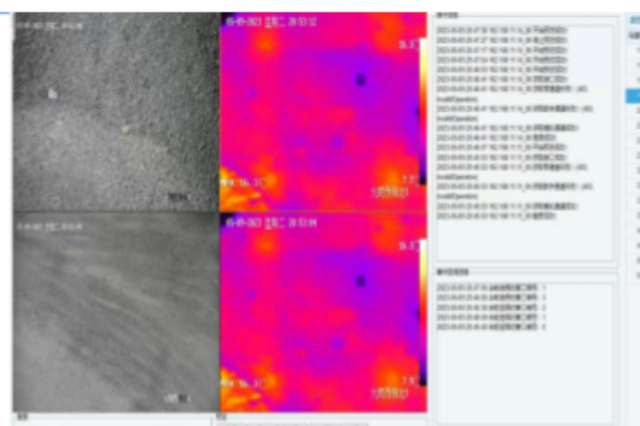 山西工业安全监测系统烟雾浓度自动报表生成
山西工业安全监测系统烟雾浓度自动报表生成在现代工业体系中,温度监测构成了一项基础性的技术保障,它既是设备安全与工艺稳定的“前哨”,也是实现精确控制和风险预警的科学依据。红外温度工业安全监测系统软件通过先进的红外热成像技术,实现了对工业环境中...
发布时间:2026.05.28 -
 浙江地面轮式巡检机器人全天候参数
浙江地面轮式巡检机器人全天候参数激光扫描仪作为盘煤巡检机器人的关键传感器,赋予其高精度测绘与定位能力。借助三维激光导航传感器,机器人能够构建包含整个料场的三维导航地图,提升路径规划的智能化水平。激光扫描技术不*捕捉煤堆表面形态的细节...
发布时间:2026.05.27 -
 浙江堆取料机无人值守系统安全防护怎么样
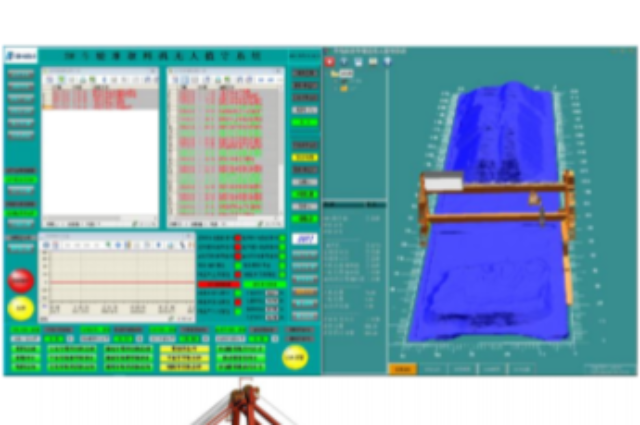
浙江堆取料机无人值守系统安全防护怎么样在散货堆场堆取料机无人值守系统中,控制台承担着连接操作人员与自动化设备的关键角色。设计过程中充分考虑了现场作业环境和用户操作习惯,配备了多功能操纵杆、按钮及选择开关,界面布局简洁,便于快速切换远程手动...
发布时间:2026.05.26 -
 广东地面轮式巡检机器人噪声监测功能
广东地面轮式巡检机器人噪声监测功能自动化作业指导是盘煤巡检机器人系统的主要功能之一,专门针对斗轮机等堆取料设备的无人值守作业设计。机器人通过内置的定位装置和激光扫描仪,实时监测料场中煤堆的空间结构和堆积状态,并将三维模型数据传输至智能...
发布时间:2026.05.25 -
 陕西数字煤场管控系统耗煤管理参数
陕西数字煤场管控系统耗煤管理参数智能化管理是动态数字煤场管控系统的关键所在,它覆盖了煤场的进煤、耗煤及存煤多个环节。系统将煤场划分为若干存煤区域,利用三维图形动态展示各区域的煤量和存储状态。自动化测量功能确保数据及时更新,避免了传统...
发布时间:2026.05.24 -
 上海堆取料机无人值守系统数字化PLC控制指令
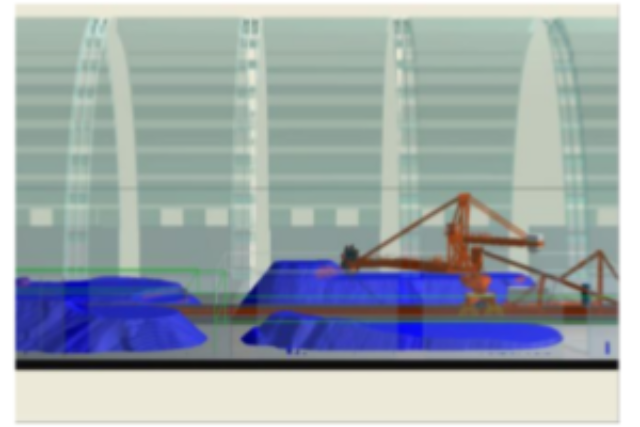
上海堆取料机无人值守系统数字化PLC控制指令自动化堆取料作业中,安全急停功能扮演着重要的角色,保障设备与人员的操作安全。安全急停堆取料机无人值守系统利用激光扫描技术与三维数字模型,实时采集料堆形态及设备姿态,构建动态的三维图像和料堆信息库。系统...
发布时间:2026.05.23 -
 广东堆取料机无人值守系统自动化
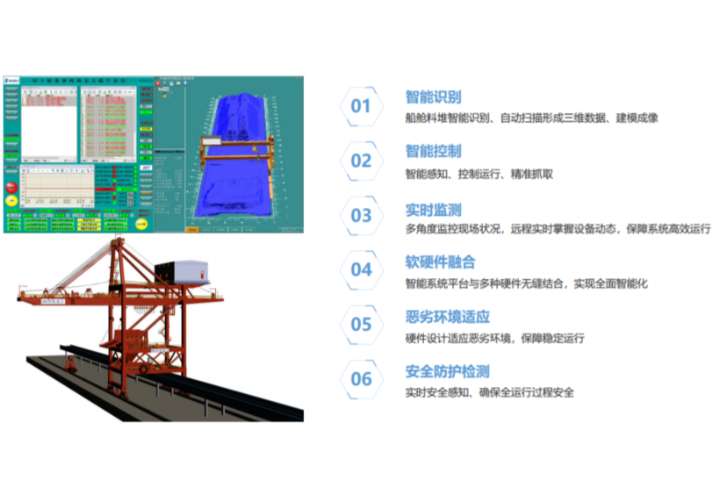
广东堆取料机无人值守系统自动化操作大型料场堆取料机无人值守系统时,远程监控与自动化控制的协调至关重要。操作台设于输料综合楼,配备操纵杆、按钮及选择开关,操作人员借此实现对堆取料机的实时指令下达。作业流程从确认计划开始,系统接收任务...
发布时间:2026.05.22