新闻中心 - 上海诺尚信息技术有限公司
-
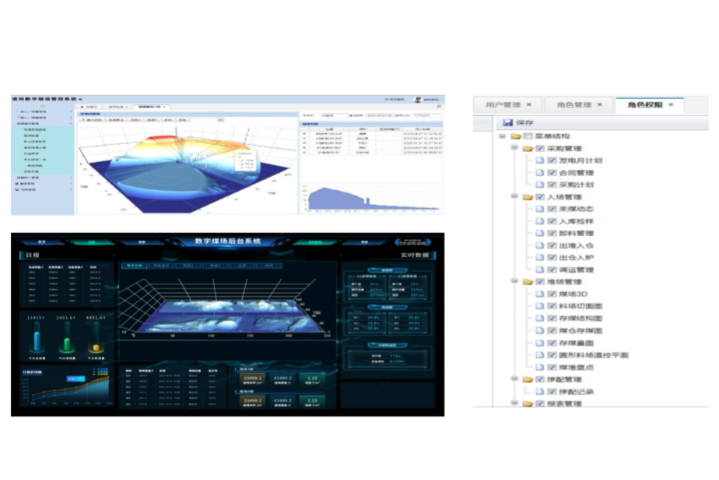
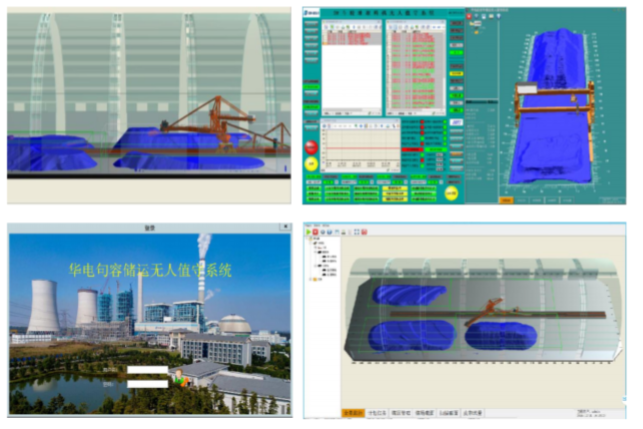
 上海数字煤场管控系统大型料场数据处理
上海数字煤场管控系统大型料场数据处理煤场管理中,数字化管控系统逐渐成为提升管理效率和安全保障的关键工具。系统通过多维数据采集,实现煤堆温度、体积及存放区域的实时监测,辅助制定科学的取煤计划,优化资源配置。管理流程涵盖进煤、耗煤和存煤环节...
发布时间:2026.03.03 -
 云南电气房轨道巡检机器人参数监测
云南电气房轨道巡检机器人参数监测局部放电检测是电气设备维护中的关键环节,尤其适用于电气房这种设备密集且环境复杂的场所。轨道巡检机器人搭载高灵敏度局部放电传感器,能够持续捕获设备内部微弱放电信号,这些信号通常预示绝缘性能下降或潜在故障...
发布时间:2026.03.02 -
 山西数字煤场管控系统上煤选型
山西数字煤场管控系统上煤选型操作数字煤场管控系统时,简化流程和界面指引是关键,确保煤矿和发电集团用户能够迅速掌握并高效执行。系统启动后,自动化设备完成煤场三维激光扫描,生成精确的煤堆分区模型,随后根据煤种和参数划定存煤区域。操作...
发布时间:2026.03.02 -
 广东堆取料机无人值守系统自动化实时扫描
广东堆取料机无人值守系统自动化实时扫描散货堆场中的堆取料机无人值守系统依赖于PLC控制指令的准确传递与执行,这一环节在自动化作业中起着关键作用。PLC负责将上位机下达的作业任务转化为具体动作,确保堆取料机按计划完成堆料与取料过程。系统利用...
发布时间:2026.03.01 -
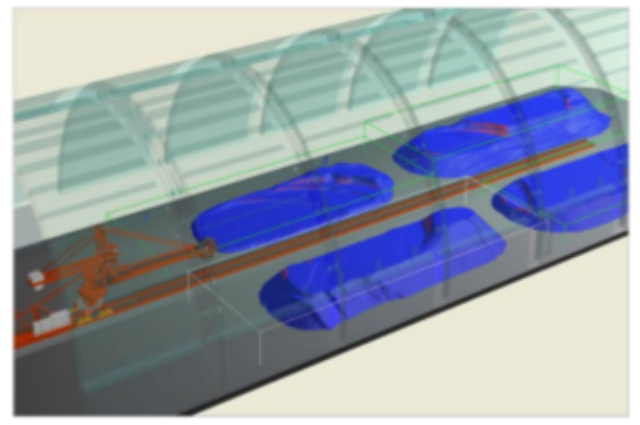 广东堆取料机无人值守系统散货堆场开发
广东堆取料机无人值守系统散货堆场开发石化行业的料场管理面临多样化的堆料形态和复杂作业需求,如何实现堆取料机的无人值守成为关注焦点。理想的无人值守系统应具备精确的料堆扫描和智能调度能力,同时兼顾安全防护。通过激光扫描技术,系统能够实时捕获...
发布时间:2026.02.28 -
 山西堆取料机无人值守系统自动化安装流程
山西堆取料机无人值守系统自动化安装流程安全急停堆取料机无人值守系统的检测功能涵盖多种安全防护模块,旨在有效管理设备运行风险。系统包含激光扫描检测装置、料位监测系统、斗轮机定位识别系统及安全防护组件。激光扫描装置安装于堆料机悬臂和取料机门架...
发布时间:2026.02.27 -
 温湿度检测的作用智能巡检系统
温湿度检测的作用智能巡检系统继电室作为电力系统的重要环节,对设备运行安全有较高要求。继电室室内轮式升降巡检机器人由多个功能模块组成,构建了一个集成化的智能巡检平台。主要硬件包括红外热像仪和高清可见光摄像机,用以捕捉设备表面温度和...
发布时间:2026.02.26 -
 上海工业安全监测系统粉尘扬尘自动寻检
上海工业安全监测系统粉尘扬尘自动寻检堆取料机作为大型料场的主要设备,其安全性和稳定性直接影响到物料的存储和运输效率。工业安全监测系统在堆取料机上的应用显得尤为重要。通过该系统,企业可以实时监控设备的运行状态,包括机械部件的磨损情况、设备...
发布时间:2026.02.25 -
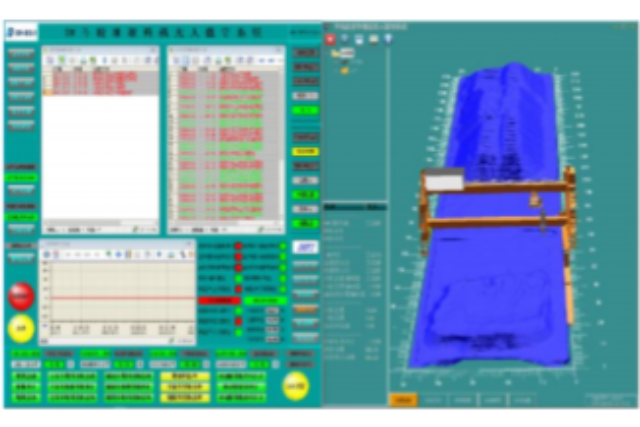
 河北堆取料机无人值守系统工业激光扫描
河北堆取料机无人值守系统工业激光扫描在大型料场堆取料机无人值守系统的运行过程中,数据融合与实时监控起到关键作用。该系统通过多种传感器采集设备状态和环境信息,结合三维激光扫描数据,构建料堆的动态模型。数据处理模块实时分析采集信息,生成控制...
发布时间:2026.02.25 -
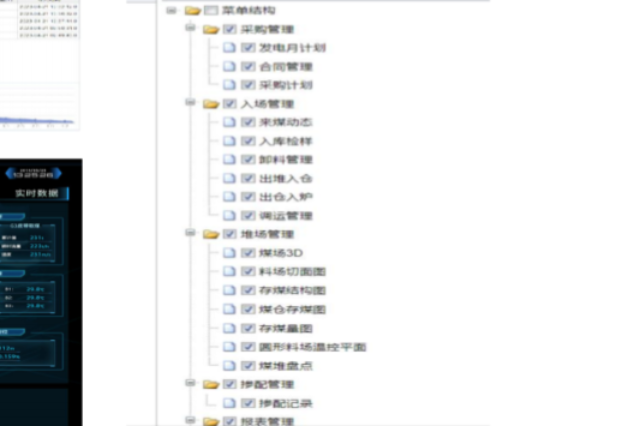 天津参数数字煤场管控系统
天津参数数字煤场管控系统智能化管理是动态数字煤场管控系统的关键所在,它覆盖了煤场的进煤、耗煤及存煤多个环节。系统将煤场划分为若干存煤区域,利用三维图形动态展示各区域的煤量和存储状态。自动化测量功能确保数据及时更新,避免了传统...
发布时间:2026.02.24 -
甘肃堆取料机无人值守系统安全急停
数字化堆取料机无人值守系统的操作设计以简化流程和提升效率为目标,同时注重安全和精确控制。操作人员主要通过位于输料综合楼的远程控制台进行管理,该控制台配备操纵杆、按钮及选择开关,支持多种操作模式切换,包...
发布时间:2026.02.14 -
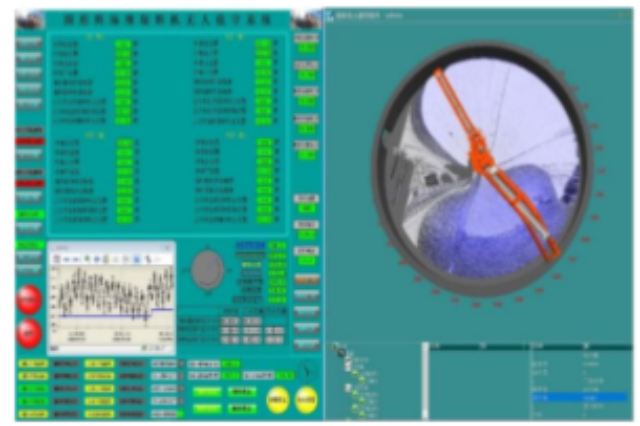 上海堆取料机无人值守系统数字化激光扫描
上海堆取料机无人值守系统数字化激光扫描在大型料场和燃煤电厂中,刮板防撞堆取料机无人值守系统发挥着重要作用,主要针对传统人工操作中存在的安全风险和效率限制进行改进。该系统集成了毫米波雷达等多种安全防护设备,能够持续监测刮板周边环境,一旦检测...
发布时间:2026.02.13