商机详情 -
长春非隧道式汽车面漆检测设备价格
本发明的设备再喷涂时将喷涂区域密封,避免了油漆外漏污染汽车表面油漆。附图说明为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图jinjin是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。下面结合附图和实施例对本发明进一步说明。图1是本发明的一种汽车外漆修补抛光一体机整体结构示意图。图2是图1中仰视图。图3是图1中a-a的结构示意图。图4是图1中b的放大结构示意图。具体实施方式下面结合图1-4对本发明进行详细说明,其中,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。结合附图1-4所述的一种汽车外漆修补抛光一体机,包括机身10以及设置于所述机身10底壁内开口向下的转动腔14,所述转动腔14圆周壁内设置有开口向下的环形滑槽11,所述环形滑槽11内可滑动的设置有用于防止油漆扩散的密封罩15,所述密封罩15与所述环形滑槽11顶壁间设置有顶压弹簧12,所述转动腔14内可转动的设置有转动架13。宜兴热门汽车面漆检测设备选择哪家,推荐领先光学技术(江苏)有限公司。长春非隧道式汽车面漆检测设备价格
汽车面漆检测设备
汽车面漆检测设备是用于汽车整车制造工厂的后道检测工序,主要用于检测汽车表面油漆的划痕、空洞、瑕疵、凸点等缺陷的检测,是汽车生产工序后质量的保障型设备。车身骨架采用传统冲压焊装工艺制造,涂装车间只对车身骨架进行涂装,面漆采用粉末喷涂技术。由于车身骨架外露面积较小,所以面漆颜色不必与覆盖件相同,深浅各1种即可。大面积的覆盖件都是采用敷膜技术制造的塑料件,颜色有上千种。这样简化了车身涂装工艺,在降低涂装成的同时,使涂装的VOC排放达到7g/m2左右,远低于欧洲排放法规的要求。龙岩汽车面漆检测设备哪家好汽车面漆检测设备哪家好,选择领先光学技术(江苏)有限公司。

据公开消息显示,蔚来已组建300人的芯片团队,同时研发自动驾驶芯片和激光雷达芯片,**激光雷达主控芯片“杨戬”10月量产;小鹏芯片团队正在开发对标特斯拉FSD大算力自动驾驶芯片;理想也在去年扩招了芯片团队,与三安半导体合作建立苏州功率半导体产线。
而传统自主品牌车企则更多从车载使用量较大、开发难度稍低的功率半导体入手。一些车企也在自研芯片方面与芯片企业进行合作,如地平线与比亚迪、长城、理想、长安等主流车企达成量产定点合作。
中科院上海技物所研究员俞立明认为,新能源汽车产业的兴起是推动汽玻产业实现弯道超车的重大契机。建议学术界与对口企业形成长期合作,在有技术产业化可能的前提下,与企业研究院合作,完成技术走向市场的产业推广道路。并在其中找到一个合适的互利共赢模式,是科研机构转型发展的基础。汽车面漆检测设备是我公司推出以光学为基础的AOI检测设备,提高检测精度,保障汽车行业先进性。汽车产业正进入发展新阶段,与会**们指出,以同步辐射的上海大科学装置,为纳米材料的光学调控研究开创了新纪元,将这些技术有效地运用到国家支柱性产业中去,将为中国产业升级带来新的契机和突破。现在是考虑引入新技术、新方法,来突破玻璃贴膜解决汽车舒适性问题产业瓶颈的时候了,这也是全球汽车产业节能型课题。汽车面漆检测设备是提高汽车产业不可缺少的一部分。找汽车面漆检测设备推荐哪家,选择领先光学技术(江苏)有限公司。
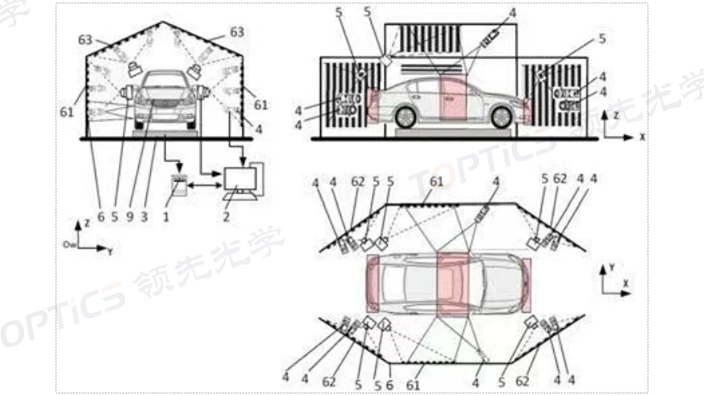
包括四套检测机械手臂、四套漆面视觉检测模组;检测时,被检测汽车移动至检测区域后,四套检测机械手臂分别带动固定在检测机械手臂前端的四套漆面视觉检测模组依据汽车表面轮廓定位检测划分规划得到的采样点,进行汽车表面的全范围成像,成像后通过汽车漆面图像处理提取汽车漆面表面外观缺陷。所述的漆面视觉检测模组包括:n套成像镜头相机组、防护外壳、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板;n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板均刚性固定在防护外壳上;且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。南京找汽车面漆检测设备推荐哪家,选择领先光学技术(江苏)有限公司。鞍山非隧道式汽车面漆检测设备生产厂家
绍兴汽车面漆检测设备选择哪家,推荐领先光学技术(江苏)有限公司。长春非隧道式汽车面漆检测设备价格
深度学习算法主要是数据驱动进行特征提取和分类决策,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和淮确、所提取的抽象特征魯棒性更強,泛化能力更好,但检测结果受样本集的影响较大。深度学习通过大量的缺陷照片数据样本训练而得到缺陷判别的模型参数,建立出一套缺陷判别模型,终目标是让机器能够像人一样具有分析学习能力能够识別缺陷。深度学习算法基于TensorFlow和Keras框架,常用的深度学习算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力网络)和CNN(卷积神经网络)为算法框架,其中RPN用于生成可能存在目标的候选区域(Proposal),CNN用于对候选区域内的目标进行识别并分类,同时进行边界回归调整候选区域边框的大小和位置使其更精淮地标识缺陷目标。FasterR-CNN相比前代的R-CNN和FastR-CNN比较大的改进是将卷积结果共享给RPV和FastR-CNN网络,在提高准确率的同时提高了检测速度。总体来讲,传统图像算法是人工认知驱动的方法,深度学习算法是数据驱动的方法。深度学习算法一直在不断拓展其成用的场景.但传统图像方法因其成熟、稳定等特征仍具有应用价值。目前。长春非隧道式汽车面漆检测设备价格