商机详情 -
漳州工业质检汽车面漆检测设备生产厂家
深度学习算法主要是数据驱动进行特征提取和分类决策,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和淮确、所提取的抽象特征魯棒性更強,泛化能力更好,但检测结果受样本集的影响较大。深度学习通过大量的缺陷照片数据样本训练而得到缺陷判别的模型参数,建立出一套缺陷判别模型,终目标是让机器能够像人一样具有分析学习能力能够识別缺陷。深度学习算法基于TensorFlow和Keras框架,常用的深度学习算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力网络)和CNN(卷积神经网络)为算法框架,其中RPN用于生成可能存在目标的候选区域(Proposal),CNN用于对候选区域内的目标进行识别并分类,同时进行边界回归调整候选区域边框的大小和位置使其更精淮地标识缺陷目标。FasterR-CNN相比前代的R-CNN和FastR-CNN比较大的改进是将卷积结果共享给RPV和FastR-CNN网络,在提高准确率的同时提高了检测速度。总体来讲,传统图像算法是人工认知驱动的方法,深度学习算法是数据驱动的方法。深度学习算法一直在不断拓展其成用的场景.但传统图像方法因其成熟、稳定等特征仍具有应用价值。目前。 这样能大幅提升可靠性,尽可能减少伪缺陷或误报缺陷的数量。漳州工业质检汽车面漆检测设备生产厂家
汽车面漆检测设备
所述花键孔25内可滑动的设置有末端伸入所述锁定槽21内的花键杆23,所述花键杆23与所述花键孔25端壁间设置有复位弹簧26,当向下按压所述机身10时,所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,所述机身10上方设置有可转动的手动轮27,将所述手动轮27转动半周通过所述机身10顶壁内设置的联动装置98可以带动所述花键杆23转动半周,此时所述机身10再所述顶压弹簧12作用下上移。有益地,所述传动装置99包括所述传动腔42顶壁内设置的齿轮腔50,所述齿轮腔50与所述传动腔42之间转动设置有第二转轴36,所述第二转轴36顶部末端转动设置于所述转动腔14顶壁内,所述第二转轴36内设置有上下贯通的贯通孔35,所述传动腔42内的所述第二转轴36底部末端固定设置有与所述螺纹套41外表面固定设置的diyi锥齿轮43啮合的第二锥齿轮38,所述齿轮腔50内的所述第二转轴36外表面固定设置有diyi齿轮37,所述齿轮腔50内可转动的设置有与所述齿轮腔50底壁内固定设置的第二电机48动力连接的第三转轴51,所述齿轮腔50内的所述第三转轴51外表面固定设置有与所述diyi齿轮37啮合的第二齿轮49,所述第三转轴51顶部末端伸入所述转动腔14顶壁内开口向下设置的凹槽54内。南昌光学方法汽车面漆检测设备推荐厂家利用计算机视觉模拟人类视觉的功能,从具体的实物进行图象的采集处理、计算、进行实际检测和应用。

汽车喷涂面漆有很多种方法,喷涂过程中也要相对的细心。那么汽车喷涂面漆有哪几种方法呢?小编分享一下我的经验。面漆的喷涂操作与底漆和二道浆的操作基本相同,只是喷涂的手法要求更加细腻一些,以获得良好的色彩光泽效果。(1)干喷指喷涂时选择的溶剂要快干,气压较大,漆量较小,温度较高等,喷涂后漆面较干。(2)湿喷指喷涂时选择的溶剂要慢干,气压较小,漆量较大,温度较低等,喷涂后漆面较湿。(3)湿碰湿同上面讲的湿喷有相似的一面,都是不等上道漆中溶剂挥发继续喷涂下一道漆。(4)虚***喷涂指在喷涂色漆后,将大量溶剂或固体分调整得极低的涂料喷涂在面漆上。(5)雾化喷涂俗称飞雾法喷涂,又叫飞漆,一般用于金属漆的施工。(6)带状涂装当喷涂某个基材表面的边缘时采用此法。此时应将喷***扇幅调得相对窄一些,一般调整到大约10cm宽。。
目前汽车车身的漆面缺陷检测主要是依赖传统的人工目视检查,因检测效率低、检测标准不够客观,并且容易受人工分心、疲劳等主观因素的影响,越来越难以满足工艺过程的测量和检测要求。因此,对自动化缺陷检测装置的需求日益增强,这种自动化缺陷检测装置不仅可以严格地管控产品质量,还能及时对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。车身漆面的缺陷种类繁多,不同的生产厂家对缺陷的定义存在差异。从缺陷的光学成像形式可以归类为:色差类缺陷、脏污类缺陷、纹理类缺陷、划伤碰伤类缺陷、凹凸类缺陷。单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。 漆面缺陷检测,能正确辨别细微颜色差异,抽取凹凸消除光晕,轻松选择光源颜色.我们提供完备的解决方案。
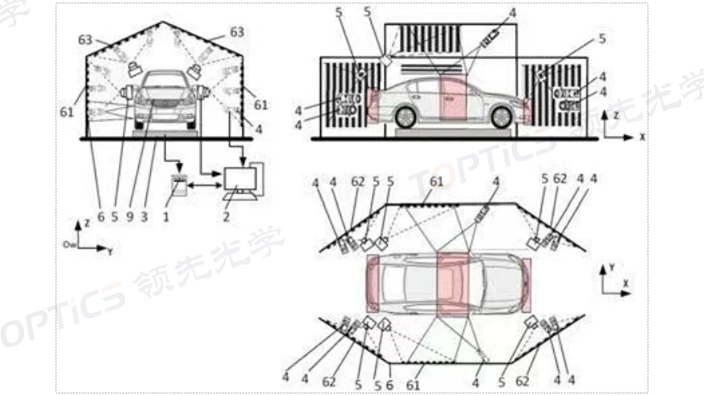
比如某豪华汽车公司规定,在引擎盖表面不允许出现直径超过2mm的颗粒缺陷,直径在1~2mm之间的颗粒不能超过1个,任意100cm2的范围内直径在1mm以下的颗粒不能超过2个,否则就判定为不合格,需要进行打磨抛光等修饰处理。常规的漆膜缺陷寻找、判定以及标记等都是由人工完成,在喷涂线之后设置面漆检查线。根据检查区域设置高度不同的工位,需要配置不同角度的光源和检查人员等,因此常规的人工检查线不仅空间占据过大而且需要过多的人员配置。2漆膜缺陷自动检测系统原理及结构计算机视觉是将图像处理、计算机图形学、模式识别、计算机技术、人工智能等众多学科高度集成和有机结合而形成的一门综合性技术。一般地说,计算机视觉是研究计算机或其他处理器模拟生物宏观视觉功能的科学和技术,也就是用机器代替人眼来做测量和判断。基于计算机视觉的表面缺陷检测技术已经大量地应用在视觉检测各个领域中,它是确保自动化生产中产品质量的一个非常重要的环节。表面缺陷自动检测技术表面缺陷视觉检测系统由照明系统、图像获取系统、图像处理系统及结果输出等模块组成。其基本原理为:在特定光源照射下,CCD相机获得检测区域清晰图片,然后将图片传送给图像处理单元。可用于优化过程控制参数,降低缺陷发生率,从根本上实现工艺优化。漳州工业质检汽车面漆检测设备生产厂家
自动检测系统是支持在流水线上短周期扫描的系统,不会中断生产节拍,可以大幅提高企业产能和工作效率。漳州工业质检汽车面漆检测设备生产厂家
所述螺纹孔内螺纹连接有与左右两个所述滑动块均固定的螺纹杆,所述转动架转动是利用所述传动腔顶壁内设置的传动装置带动所述螺纹套转动,从而带动所述螺纹杆移动,所述螺纹杆移动能够带动左右两个所述滑动块同步移动,其中左侧的所述滑动块内设置有气泵,所述气泵可以在不同时间喷出油漆或抛光液,右侧的所述滑动块底壁内设置有diyi电机,所述diyi电机输出轴末端固定设置有抛光轮,所述抛光轮高速转动同时伴随所述转动架高速转动可以实现对油漆的抛光;所述机身四个边角设置有上下贯通的滑动孔,所述滑动孔内可滑动的设置有底部末端固定有活塞的滑动杆,所述滑动杆顶部末端固定设置有限位块,所述滑动杆端壁内设置有均匀分布的锁定槽,左右两个所述滑动孔之间转动设置有diyi转轴,所述diyi转轴两侧端壁内对称设置有开口向外的花键孔,所述花键孔内可滑动的设置有末端伸入所述锁定槽内的花键杆,所述花键杆与所述花键孔端壁间设置有复位弹簧,当向下按压所述机身时,所述花键杆自上而下依次卡入所述锁定槽内,从而调整机身与所述汽车表面距离,所述机身上方设置有可转动的手动轮,将所述手动轮转动半周通过所述机身顶壁内设置的联动装置可以带动所述花键杆转动半周。漳州工业质检汽车面漆检测设备生产厂家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。