商机详情 -
苏州自动导航中型全地形履带式心战机器人哪里买
现代全地形机器人普遍集成多模态传感器阵列,包括激光雷达、惯性导航单元及视觉摄像头,配合SLAM算法实现厘米级定位精度,即便在GPS信号拒止环境下仍能自主规划路径。其动力系统多采用混合驱动方案,燃油发动机提供持续动力输出,电动模块则负责低速精细操作,这种设计既保证了8小时以上的连续作业能力,又通过能量管理策略将能耗降低30%。搭载模块化任务载荷的全地形机器人可快速转换为侦察、排爆或物资运输平台,其静音行驶模式与伪装涂层进一步提升了战场生存能力。履带式机器人的操作简单易上手,便于物资运输机器人被更普遍地使用。苏州自动导航中型全地形履带式心战机器人哪里买
履带式机器人的工作原理重要在于其独特的履带-轮系复合传动结构,该结构通过将圆环状履带套接于驱动轮、从动轮及承重轮组成的轮系上,实现了对复杂地形的适应性突破。与传统轮式机器人点接触地面的方式不同,履带与地面的接触面呈长条形分布,这种设计使接触面积明显增大,进而降低了接地比压。以极创机器人Komodo-07系列为例,其履带底盘接地长度达576mm,配合钢丝增强橡胶履带的弹性变形能力,在松软沙地或泥泞环境中可有效分散压力,避免机身下陷。驱动系统方面,双永磁直流电机分别单独驱动左右履带,通过行星轮减速器将电机转速降至5-20rpm范围,同时将输出扭矩提升至240Nm以上,这种降速增扭特性使机器人能以0.3m/s的稳定速度攀爬30°斜坡。上海自动导航中型全地形履带式心战机器人生产厂履带式机器人的行驶适应性面广,这使得物资运输机器人能在各地运输。
履带式心战机器人具备在民事宣传、公共外交等方面的潜力。在大型公共活动中,它们可以作为移动宣传平台,向公众传递正能量信息,提升社会凝聚力。在跨国文化交流项目中,心战机器人能够跨越语言障碍,以多种语言进行互动,促进不同文化背景人群之间的理解和尊重。此外,它们还可以用于城市安全巡逻,通过友好互动和信息播报,增强市民的安全感和归属感。随着技术的不断进步,履带式心战机器人的应用领域还将进一步拓展,成为连接现实与虚拟、促进国际交流与合作的重要桥梁。
全地形履带式机器人的工作原理重要在于其独特的履带行走机构与动力分配系统。该类机器人通常采用双履带对称布局,每侧履带由驱动轮、从动轮、托带轮及张紧装置构成闭合环路。驱动轮通过电机或液压马达获得动力,其外缘的同步齿与履带内表面的齿槽啮合,将旋转运动转化为履带的直线运动。履带表面采用强度高橡胶或金属链板结构,表面分布的防滑纹或履齿可嵌入松软地面(如泥地、沙地),通过增大接触面积降低接地比压,避免陷入。以某型防爆救援机器人为例,其履带宽度达300mm,接地长度576mm,在泥泞环境中可保持0.8kg/cm²的低压强,远低于人体行走时的压强,确保在灾后废墟、沼泽等复杂地形中的通过性。张紧装置通过弹簧或液压缸实时调整履带松紧度,防止因地面起伏导致履带脱落或打滑,某型号机器人的张紧系统可在±15mm范围内动态调节,适应5°-30°的坡面变化。农场灌溉设施建设,履带式物资运输机器人运物资。
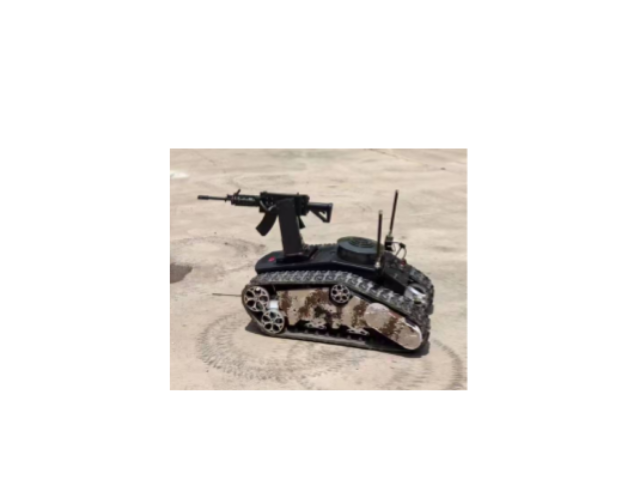
履带式救援机器人作为特种装备领域的重要载体,其功能设计始终围绕复杂灾害场景的救援需求展开。在移动性能方面,其履带式底盘通过仿生学设计模拟坦克与蛇类动物的复合运动模式,既能在瓦砾堆、泥泞地等松软地形保持30kPa以上的接地压力,又可通过差速转向系统实现原地180度调头,配合可调节的履带张紧装置,使机器人能攀爬45度斜坡并跨越0.8米宽的断层。这种机动性使其在地震废墟、山体滑坡等三维立体灾害环境中,相比轮式或足式机器人具有更强的地形适应能力。其搭载的多模态感知系统集成了360度环视摄像头、毫米波雷达、激光SLAM与热成像仪,可穿透烟雾、粉尘等视觉障碍物,实时构建厘米级精度的三维环境模型。特别在夜间或地下空间救援时,热成像模块能通过温差识别被困者体表0.5℃以上的温度变化,结合AI目标识别算法,将人员定位准确率提升至92%以上。履带式物资运输机器人精确定位,快速找到物资存放点。履带式察打一体机器人生产公司
履带式机器人的通过障碍能力出色,让物资运输机器在复杂地形无忧运输。苏州自动导航中型全地形履带式心战机器人哪里买
大型全地形履带式心战机器人的应用,还体现了现代纷争中对软杀伤能力的重视。相较于传统的硬实力对抗,心理战机器人通过精确的信息投放与情感操控,能够在不造成直接物理伤害的情况下,有效削弱对手的抵抗意志。它们能够根据不同文化背景、宗教信仰和社会心理,定制化地设计信息内容,以更加隐蔽和渗透性的方式,影响目标群体的认知与决策。在信息化纷争日益成为主流的如今,心战机器人的普遍部署与使用,不仅是对传统力量的重要补充,更是对未来战场多维空间控制权争夺的一次深刻变革。苏州自动导航中型全地形履带式心战机器人哪里买