新闻中心 - 扬州熙岳智能科技有限公司
-
 连云港木材瑕疵检测系统案例
连云港木材瑕疵检测系统案例在汽车电子领域,瑕疵检测系统正在重构质量管控流程。日本基恩士的IV系列传感器使PCB检测速度达到传统AOI设备的3倍,其三维激光扫描技术能识别0201封装电容的焊接空洞。在锂电池生产线上,德国Frau...
发布时间:2025.05.21 -
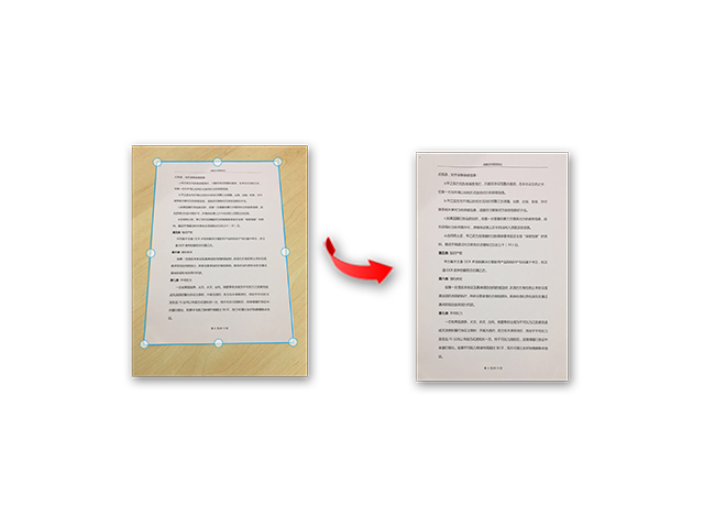
 徐州线扫激光瑕疵检测系统
徐州线扫激光瑕疵检测系统在机器视觉检测中,图像则需提供足够的信息,例如边缘、形状、大小等,用于算法读取并理解。人眼视觉和机器视觉并无孰优孰劣之分,因为两者服务于不同的目的和应用。图像识别,是利用机器视觉检测设备对图像进行处理...
发布时间:2025.05.21 -
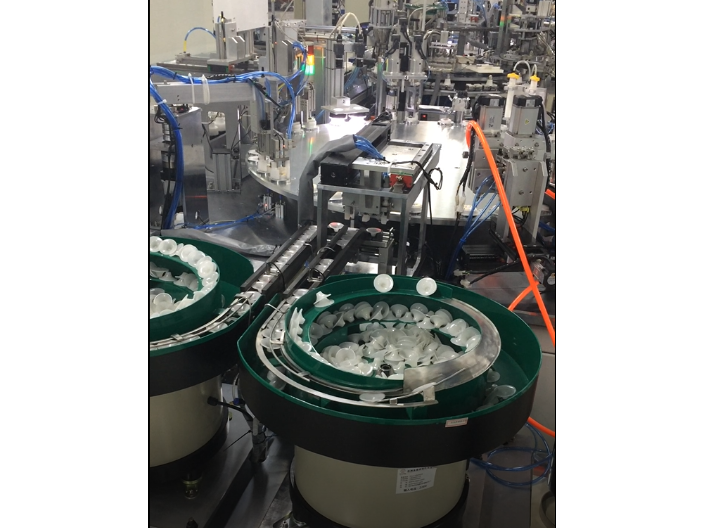
 山东密封盖定制机器视觉检测服务品牌
山东密封盖定制机器视觉检测服务品牌瑕疵检测系统可以通过虚拟现实技术来实现对产品表面的虚拟检测。虚拟现实技术为瑕疵检测开辟了一种全新的、沉浸式的检测模式。借助虚拟现实设备,检测人员可以仿佛置身于产品的微观世界中对其表面进行检测。例如对于...
发布时间:2025.05.19 -
 江西番茄智能采摘机器人服务价格
江西番茄智能采摘机器人服务价格采摘机器人的价值创造体现在多维效果矩阵中。经济效益方面,西班牙柑橘机器人的ROI(投资回报率)模型显示,在规模化应用场景下,5年周期内的净现值可达初始投资的2.8倍;环境效益上,英国草莓机器人通过精细...
发布时间:2025.05.19 -
 天津智能智能采摘机器人服务价格
天津智能智能采摘机器人服务价格在现代规模化果园中,采摘机器人已形成多层级协同作业体系。以柑橘类果园为例,配备LiDAR与多光谱相机的机器人集群,通过边缘计算节点实现任务动态分配。当某区域果实成熟度达到阈值时,协调者机器人立即调度3...
发布时间:2025.05.18 -
 北京品质智能采摘机器人产品介绍
北京品质智能采摘机器人产品介绍垂直农场催生出三维空间作业机器人。以叶菜类生产为例,机器人采用六足结构适应多层钢架,其足端配备力传感器,在狭窄通道中仍能保持稳定。视觉系统采用结构光三维扫描,可识别不同生长阶段的植株形态,自动调整采摘...
发布时间:2025.05.18 -
 江苏定制机器视觉检测服务供应商
江苏定制机器视觉检测服务供应商其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解...
发布时间:2025.05.17 -
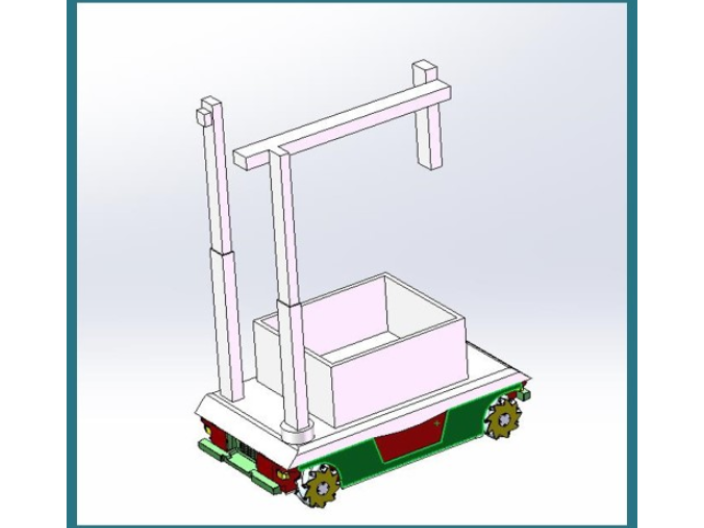
 安徽一种智能采摘机器人
安徽一种智能采摘机器人采摘机器人作为现代农业技术的前沿成果,正在深刻重塑传统农业的作业模式。这类集成计算机视觉、机械臂控制、人工智能算法的高精度设备,能够替代人工完成水果、蔬菜等经济作物的选择性采收。以草莓采摘机器人为例,...
发布时间:2025.05.17