新闻中心 - 扬州熙岳智能科技有限公司
-
 上海供应智能采摘机器人用途
上海供应智能采摘机器人用途采摘机器人是农业科技皇冠上的一颗明珠,其运作远非简单的“识别-抓取”所能概括,而是一个融合了多学科前沿技术的复杂系统。其始于“感知”。在进入果园或农田前,机器人并非一张白纸,它已经通过深度学习模型,在...
发布时间:2026.01.05 -
 北京现代智能采摘机器人
北京现代智能采摘机器人要在温室或大田的不平坦地面、狭窄垄间自如作业,机器人需要一个稳健而灵活的移动平台。在结构化的现代温室内,常见的是轨道式或吊轨式平台,它们能提供稳定、高效的直线移动,能量供给持续,但灵活性稍逊。对于更广...
发布时间:2026.01.05 -
 现代智能采摘机器人性能
现代智能采摘机器人性能番茄采摘机器人的研发与应用呈现明显的全球性图景。在荷兰、日本、美国、以色列等设施农业高度发达的国家,相关技术已进入商业化应用阶段,在大型玻璃温室中扮演关键角色。这些国家的技术路线往往与本国农业特点结合...
发布时间:2026.01.04 -
 福建制造智能采摘机器人案例
福建制造智能采摘机器人案例展望未来,番茄采摘机器人不会止步于单一的采摘功能。它正演变为一个多功能的“农业机器人平台”。未来的机型可能集成了采摘、修剪、疏花、植保监测甚至精细授粉等多种作业模块,通过快速换装工具头实现“一机多用”...
发布时间:2026.01.04 -
 海南猕猴挑智能采摘机器人价格低
海南猕猴挑智能采摘机器人价格低核桃、杏仁等坚果的采收传统上依赖大型机械振动树干,再地面收集。新一代坚果采摘机器人则更加精细环保。它们采用自适应振动技术,通过传感器分析树干特性,施加合适的频率和振幅,使成熟坚果高效脱落而不伤树木。地...
发布时间:2026.01.03 -
 福建多功能智能采摘机器人价格低
福建多功能智能采摘机器人价格低现代采摘机器人不仅是执行终端,更是农业数据网络的关键节点。每次采摘动作都伴随着多维数据收集:果实大小、重量、色泽、糖度,乃至植株健康状况。这些数据通过5G网络实时上传至云端,与气象、土壤、灌溉数据融合...
发布时间:2026.01.02 -
 江西农业智能采摘机器人用途
江西农业智能采摘机器人用途柑橘采摘是劳动密集型产业的典型**。柑橘采摘机器人通常采用“摇撼-收集”或“选择性采摘”两种模式。前者通过振动树干使果实脱落,下方有伞状收集装置承接;后者则更为精密,使用3D视觉定位每个果实,计算比较...
发布时间:2026.01.02 -
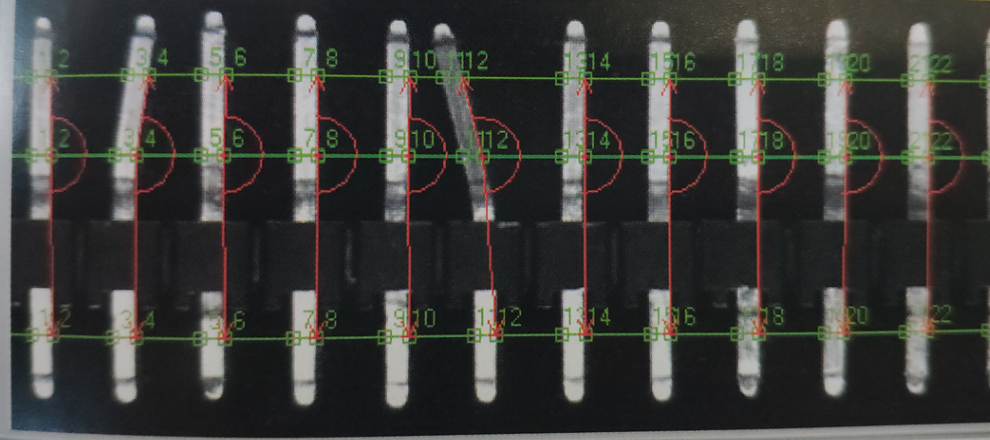 广东压装机定制机器视觉检测服务产品介绍
广东压装机定制机器视觉检测服务产品介绍我们的定制视觉检测,为您的企业提供定制化的品质解决方案。每个企业的生产模式、产品特性与品质痛点都各不相同,通用方案难以解决问题。我们会组建专属项目团队,深入企业生产现场,与技术、生产、质检团队深度沟通...
发布时间:2026.01.01