新闻中心 - 扬州熙岳智能科技有限公司
-
 杭州冲网瑕疵检测系统性能
杭州冲网瑕疵检测系统性能瑕疵检测光源设计很关键,不同材质需匹配特定波长灯光凸显缺陷。光源是影响图像质量的因素,不同材质对光线的反射、吸收特性不同,需匹配特定波长灯光才能凸显缺陷:检测金属等高反光材质,采用偏振光(波长 550...
发布时间:2026.01.13 -
 上海番茄智能采摘机器人公司
上海番茄智能采摘机器人公司葡萄、猕猴桃等藤本作物的机械化采收需要特殊解决方案。法国研发的葡萄采摘机器人采用仿生触觉技术:机械臂末端配置压电纤维传感器,在接触果梗时模拟人手触感,通过微振动寻找比较好施力点。为适应不同葡萄品种,机...
发布时间:2026.01.12 -
 浙江草莓智能采摘机器人案例
浙江草莓智能采摘机器人案例采摘机器人的发展将沿着“更智能、更协同、更融合”的路径演进。在技术层面,人工智能的突破将是主要驱动力。基于更强大的深度学习模型和更大的农业图像数据集,机器人的视觉系统将能应对更复杂的遮挡和光照条件,实...
发布时间:2026.01.11 -
 苏州铅板瑕疵检测系统用途
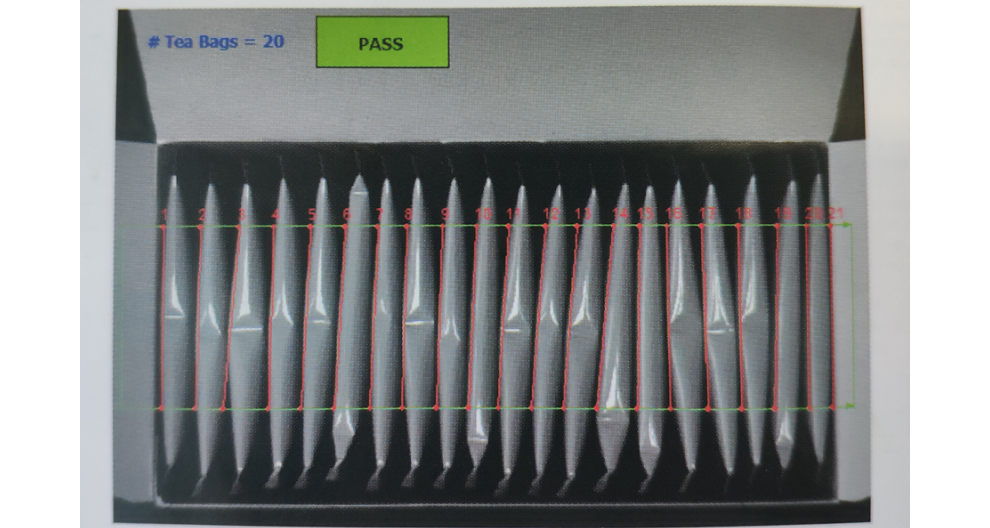
苏州铅板瑕疵检测系统用途自动化瑕疵检测系统不仅是一个“筛选工具”,更是数字化质量管理体系的核心数据入口。现代系统强调检测结果的标准化记录和全过程可追溯。每一次检测,系统不仅输出“合格/不合格”的判定,还会将原始图像、缺陷特征...
发布时间:2026.01.11 -
 浙江榨菜包定制机器视觉检测服务价格
浙江榨菜包定制机器视觉检测服务价格定制视觉检测服务,让您的产品在市场上更具竞争力。在同质化严重的市场中,产品品质是企业赢得客户的筹码。定制视觉检测服务通过严苛的品质管控,让产品在细节上远超竞品。例如,同类型家电产品,您的产品因采用定制...
发布时间:2026.01.11 -
 福建草莓智能采摘机器人制造价格
福建草莓智能采摘机器人制造价格尽管前景广阔,番茄采摘机器人仍面临诸多技术挑战。首先是复杂环境的鲁棒性:如何应对极端天气、尘土覆盖镜头、枝叶剧烈晃动或高度密集的果实簇。其次是品种的普适性:不同番茄品种(如大果牛排番茄与小果樱桃番茄)...
发布时间:2026.01.10 -
 上海传送带跑偏定制机器视觉检测服务售价
上海传送带跑偏定制机器视觉检测服务售价我们的定制视觉检测,为您的企业提供个性化的品质支持。每个企业的生产模式、产品特性与品质目标都存在差异,通用检测服务难以满足个性化需求。我们会深入了解您企业的发展战略、市场定位以及当前面临的品质痛点,在...
发布时间:2026.01.09 -
 福建梨智能采摘机器人品牌
福建梨智能采摘机器人品牌苹果采摘机器人是一个集成了多学科前沿技术的复杂系统。其关键在于通过高精度视觉模块识别果实,通常采用多光谱或深度摄像头结合机器学习算法,能在复杂自然光照下分辨苹果的成熟度、大小和位置,甚至能判断轻微缺陷...
发布时间:2026.01.09
