新闻中心 - 大儒科技(苏州)有限公司
-
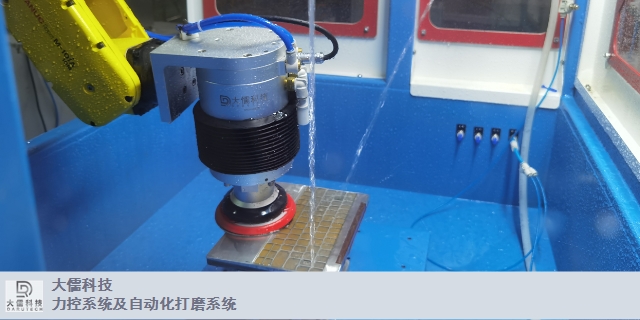
 正规柔性打磨系统
正规柔性打磨系统在工业制造领域,有很多零件需要在焊接、铸造、成型或加工后进行后处理,包括打磨,抛光。例如新能源汽车行业的电池托盘、变速箱壳体、汽车轮毂。目前大部分工件打磨加工作业大多采用机器人安装手持气动,电动工具进...
发布时间:2026.03.19 -
 宁波柔性打磨控制系统
宁波柔性打磨控制系统铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导...
-
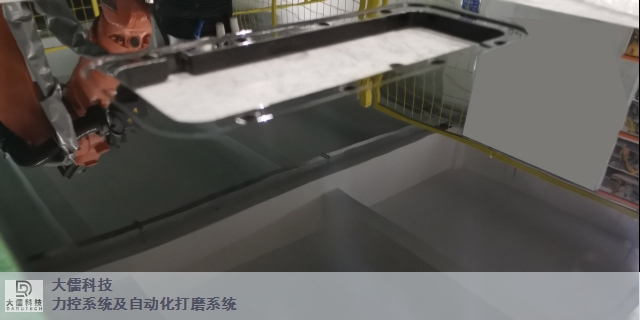
 张家港柔性打磨代理商
张家港柔性打磨代理商针对薄壁件的自动打磨问题,安装使用智能打磨柔性打磨是简单有效的恒力打磨加工方法。通过在KUKA工业机器人末端的气动柔顺力控制功能使得打磨工具始终压紧被加工表面,且压力大小保持恒定,根据规划路径调整机器...
-
 南京柔性打磨答疑解惑
南京柔性打磨答疑解惑针对薄壁件的自动打磨问题,安装使用智能打磨柔性打磨是简单有效的恒力打磨加工方法。通过在KUKA工业机器人末端的气动柔顺力控制功能使得打磨工具始终压紧被加工表面,且压力大小保持恒定,根据规划路径调整机器...
-
 金属铸件表面柔性打磨来电咨询
金属铸件表面柔性打磨来电咨询汽车后视镜作为外观关键件,塑料与碳纤维材质对表面精度要求极高,合模线去除与表面砂光直接影响涂装效果与产品档次。大儒科技 DFC 力控系统以柔性打磨为**优势,适配后视镜复杂弧面与异形轮廓,在去合模线与...
-
 金属铸件表面柔性打磨装置
金属铸件表面柔性打磨装置在木门、衣柜厨柜门等表面雕琢后需要进行打磨,从而使后续的上油漆过程中节省油漆同时提高油漆的均匀性,现有技术主要是通过拿砂纸来回摩擦实现,其不但费时费力,而且由于人工的力度在各个阶段可能各不相同,从而也...




