商机详情 -
南京哪些芯片引脚整形机哪里有卖的
双手操作按钮:一些半自动芯片引脚整形机需要双手同时按下按钮才能启动机器,以确保操作人员已经做好了安全准备。这种双手操作按钮通常与紧急停止开关结合使用,以提高安全性。防止过载保护装置:这种装置可以检测机器的负载情况,当机器超载时,装置会自动停止机器的运行,以避免机器损坏和发生危险。防护门:一些半自动芯片引脚整形机配备了防护门,以防止操作人员接触到机器内部的危险部位。防护门应该能够完全覆盖机器的开口,并能够正常关闭以确保安全性。旋转编码器:一些半自动芯片引脚整形机配备了旋转编码器,以检测机器的旋转部位是否在正确的位置。当旋转部位不在正确的位置时,机器会自动停止运行,以避免发生危险。压缩空气保护装置:一些半自动芯片引脚整形机使用压缩空气进行工作,为了确保安全性,机器配备了压缩空气保护装置。当压缩空气不足时,机器会自动停止运行,以避免发生危险。
芯片引脚整形修复原理。南京哪些芯片引脚整形机哪里有卖的

停机检查:首先应立即停机,并断开电源,以避免故障扩大和造成安全事故。故障现象记录:详细记录故障现象,包括故障发生的时机、现象、影响范围等,以便后续排查和分析。外观检查:对机器的外观进行检查,查看是否有明显的破损、断裂、变形等情况,以及是否有异常的液体渗漏等。控制系统检查:检查机器的控制系统,包括电气线路、控制面板、传感器等,查看是否有明显的破损、松动、短路等情况。传动系统检查:检查机器的传动系统,包括电机、减速机、齿轮箱等,查看是否有异常的噪音、震动、磨损等情况。夹具和刀具检查:检查机器的夹具和刀具,查看是否有松动、磨损、断裂等情况,以及是否与芯片规格相符。排查故障原因:根据故障现象和外观检查的结果,结合机器的工作原理和控制系统的知识,初步排查故障的原因。拆卸和检查部件:根据排查结果,逐步拆卸和检查相关部件,如电机、传感器、夹具等,以找出故障的具体原因。修复和更换部件:根据排查和拆卸检查的结果,修复或更换故障部件,如更换损坏的电机、传感器或夹具等。调试和测试:修复或更换部件后,进行调试和测试,确保机器恢复正常工作状态,并验证故障是否得到解决。
南京哪些芯片引脚整形机哪里有卖的半自动芯片引脚整形机的精度和稳定性如何?

上述芯片引脚夹具阵列的侧面设有剪切导槽,剪切导槽沿芯片引脚夹具的轴向方向延伸。通过剪切导槽,在实际使用的过程中可根据实际需要,灵活的从芯片引脚夹具阵列中截取目标片段,以满足引脚数量各异的芯片检测需求。更为推荐的,剪切导槽包括***剪切导槽,***剪切导槽位于芯片引脚夹具阵列侧面的芯片引脚夹具耦合处。通过***剪切导槽,可以准确地从芯片引脚夹具阵列中截取包含目标数量的芯片引脚夹具,以**大化芯片引脚夹具阵列的利用率。更为推荐的,剪切导槽包括第二剪切导槽,第二剪切导槽位于芯片引脚夹具***侧平面的中部。通过第二剪切导槽,可以从芯片引脚夹具阵列中截取出一段两端均为半个芯片引脚夹具的片段,该片段两端的半个芯片引脚夹具可以夹持于芯片引脚,起到加紧的作用。与单个芯片引脚夹具或者完整的芯片引脚夹具阵列相比,这种带有半个芯片引脚夹具的固定更加稳定。更为推荐的,上述剪切导槽为v型槽。v型槽的受力比较集中,可以提供良好的应力集中点,使剪切更为方便。更为推荐的,芯片引脚夹具阵列的壳体部分为一体成型。一体成型的工艺可以大幅度的简化工艺流程,降低加工成本。同时。
半自动芯片引脚整形机的机械手臂通常采用高精度的伺服控制系统来实现对芯片引脚的高精度整形。机械手臂通过与高精度X/Y/Z轴驱动系统的配合,可以实现精确定位和运动控制。X/Y/Z轴驱动系统通常采用伺服电机和精密滚珠丝杠等高精度运动部件组成,能够实现微米级别的运动精度。在整形过程中,机械手臂首先将芯片放置在定位夹具上,然后根据预设的整形程序,通过高精度X/Y/Z轴驱动系统实现芯片引脚的精确定位和调整。伺服控制系统可以实时监测和调整运动位置和速度,以确保整形过程的精确性和稳定性。此外,机械手臂还配备了高精度的传感器和反馈系统,可以实时检测芯片引脚的形状和位置信息,并根据反馈信息调整运动轨迹和整形程序,以确保良好的整形效果。总之,半自动芯片引脚整形机的机械手臂通过与高精度X/Y/Z轴驱动系统的配合,可以实现高精度的运动控制和整形过程,确保每个芯片引脚都能够得到良好的修复效果。如何对半自动芯片引脚整形机进行升级或改进,以适应新的应用需求和技术发展?
凸起213沿柱体的轴向方向延伸。壳体210的顶面设置有第二凹槽212,在一种推荐的实施方式中,***凹槽211和第二凹槽212的开口形状为矩形,但在其它的实施方式中,也可以将开口设置为其它形状。请参见图3,是本发明实施例提供的一种弹片320的结构示意图,弹片320包括触点部321和转接部322。在一种推荐的实施方式中,触点部321的一侧包括曲面,例如可设置为圆弧形。转接部322的形状应与壳体的第二凹槽的开口形状相匹配,以确保安装精度和稳定性。为更清楚的阐述芯片引脚夹具的内部结构,请参见图4,是本发明实施例提供的一种芯片引脚夹具400的剖面示意图。壳体410的***凹槽411可分为三个部分,分别为上部、中部和下部,***凹槽411的中部的深度大于上部深度及下部的深度。壳体410上还设置有通孔(未标号),弹片420紧靠通孔内壁安装,弹片420延伸至***凹槽411中部形成触点部421,弹片420还延伸至第二凹槽(未标号)形成转接部422,转接部422暴露于壳体410外。在其它一些实施方式中,转接部422可以*覆盖第二凹槽的部分底面。凸起413与***凹槽上侧面之间具有***间隙414,凸起413与***凹槽下部的底面之间具有第二间隙415,***间隙414和第二间隙415均不小于待测芯片的引脚厚度。半自动芯片引脚整形机的可靠性如何?有哪些保证其稳定运行的措施?上海全自动芯片引脚整形机联系方式
如何保证半自动芯片引脚整形机的精度和稳定性不受环境影响?南京哪些芯片引脚整形机哪里有卖的
半导体芯片引脚整形机工作原理
半导体芯片引脚整形机的工作原理主要基于机械和电气原理。
首先,引脚整形机通过高精度的机械结构,实现对引脚的固定。然后,通过高精度的电机驱动和系统,实现引脚的弯曲、修剪、调整等操作。
同时,机器内部装有传感器,可以实时监测引脚的位置和状态,确保整形过程的一致性和准确性。在具体操作中,引脚整形机通常采用自动化或半自动化的工作方式。操作员将芯片放入机器的夹具中,设置好所需的整形参数,机器会自动完成引脚的整形过程。整形过程结束后,机器会自动检测引脚的状态,确保整形效果符合要求。
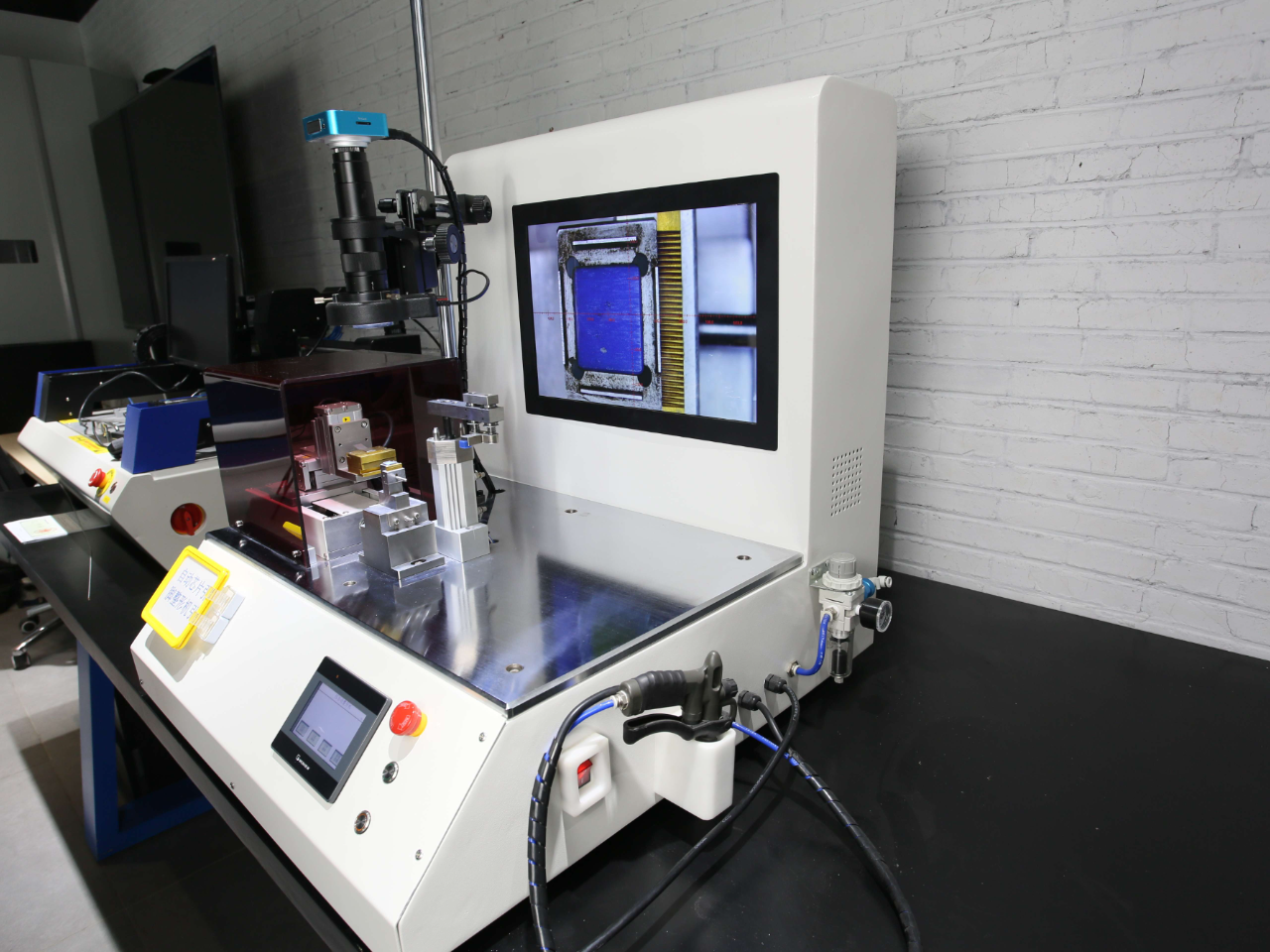
此外,为了提高整形精度和效率,一些的引脚整形机还采用了计算机视觉技术。通过高分辨率的摄像头和图像处理算法,机器可以实时获取引脚的位置和状态信息,从而更加引脚的弯曲和调整。这种技术的应用,不仅提高了整形精度和效率,同时也减少了人工干预和操作难度。
总之,半导体芯片引脚整形机的工作原理是通过对引脚的固定、弯曲、修剪和调整等操作,实现引脚的整形。通过高精度的机械结构、电机驱动以及计算机视觉技术的应用,引脚整形机能够提高整形精度和效率,减少人工干预和操作难度。 南京哪些芯片引脚整形机哪里有卖的