商机详情 -
视觉位移计资料
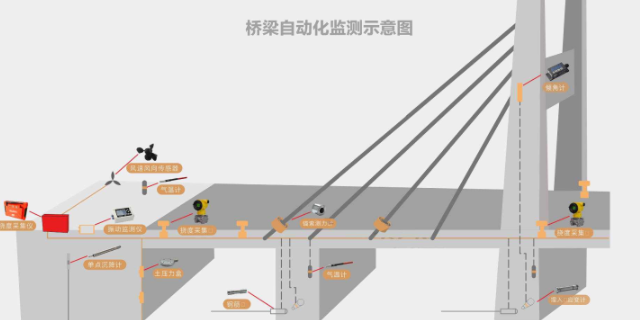
下面是一些常见的位移测量仪器:拉线位移传感器:拉线位移传感器是一种通过测量拉线的伸长或缩短来确定位移的装置。它通常由一个固定的支架和一个可移动的拉线组成,通过测量拉线的变化来确定位移。压阻式位移传感器:压阻式位移传感器是一种通过测量电阻的变化来确定位移的装置。它通常由一个可变电阻和一个测量电路组成,通过测量电阻的变化来确定位移。摄像测量系统:摄像测量系统使用摄像机和图像处理软件来测量物体的位移。它通过拍摄物体的图像并使用图像处理算法来确定位移。GPS定位系统:GPS定位系统使用全球定位系统(GPS)卫星来确定物体的位置。它通过接收来自多个卫星的信号并使用三角测量方法来确定位置。 位移计可以用于研究和监测气候变化和海平面上升。视觉位移计资料

位移计在地震监测中具有重要的作用。地震是地球内部能量释放的结果,会引起地表的震动和位移。位移计是一种用于测量地表位移的仪器,可以记录地震期间地表的水平和垂直位移。以下是位移计在地震监测中的重要性:地震研究:位移计可以提供地震研究人员关于地震活动的重要数据。通过测量地表位移,可以了解地震的震源位置、震级、震源机制等信息,有助于研究地震的发生机制和规律。预警系统:位移计可以用于地震预警系统中。地震预警系统是一种能够提前几秒到几十秒发出地震警报的系统,可以给人们提供逃生和采取保护措施的时间。位移计可以实时监测地表位移,当位移超过预设阈值时,预警系统可以及时发出警报,提醒人们采取行动。 相机位移计多少钱位移计可以帮助工程师和科学家更好地理解和控制物体的运动和变形。
姿态估计:在传感器测量的基础上,相机位移计使用姿态估计算法来推导相机的位移和姿态信息。姿态估计算法通常基于传感器测量数据,通过数学模型和滤波技术来估计相机的姿态。常见的姿态估计算法包括卡尔曼滤波、扩展卡尔曼滤波、粒子滤波和非线性优化等。这些算法可以根据传感器测量数据的特点和应用需求,选择合适的方法来估计相机的位移和姿态。姿态估计算法通常需要考虑传感器的误差、噪声和不确定性等因素,并通过滤波和校准等技术来提高估计的准确性和稳定性。
仪器安装位置选择:位移计的安装位置选择对测量结果有重要影响。如果安装位置选择不当,可能会导致测量误差增大。解决方法是根据具体测量需求选择合适的安装位置,并遵循仪器说明书中的建议。仪器与被测对象之间的连接问题:位移计需要与被测对象进行连接,以实现位移测量。连接方式不正确或连接不牢固可能导致测量误差。解决方法是确保连接方式正确,并使用适当的连接件进行连接。仪器读数误差校正:位移计的读数可能存在一定的误差,需要进行误差校正。解决方法是根据仪器说明书中的校正方法进行校正,或者使用校准设备进行校正。位移计的测量结果可以用于验证模型和理论,优化设计和改进产品性能。
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和计算单元组成,能够实时地监测相机的位置和方向,并将这些数据用于各种应用,如虚拟现实、增强现实、机器人导航等。相机位移计的工作原理通常基于传感器技术,包括惯性测量单元(IMU)、全局定位系统(GPS)、视觉传感器等。这些传感器能够感知相机的加速度、角速度、方向等信息,并将其转化为数字信号,供计算单元进行处理。在相机位移计中,IMU是蕞常用的传感器之一。它由加速度计和陀螺仪组成,能够测量相机的线性加速度和角速度。通过积分这些测量值,可以得到相机的速度和位移。然而,由于积分的误差会随着时间的推移而累积,所以IMU通常需要与其他传感器结合使用,以提高测量的准确性和稳定性。 位移计在工程领域中广泛应用,用于监测结构物的变形、测量机械零件的运动等。视觉位移计分类
这种测量系统可以应用于多个领域,如机械工程、材料科学和生物医学等。视觉位移计资料
位移计的测量原理有多种,下面介绍几种常见的位移计测量原理:光学位移计:光学位移计利用光学原理来测量位移。它通常由一个光源、一个光学传感器和一个测量物体组成。光源发出光线,经过物体反射后被光学传感器接收。通过测量光线的强度、相位或干涉等参数的变化,可以确定物体的位移量。电阻式位移计:电阻式位移计利用电阻的变化来测量位移。它通常由一个电阻元件和一个测量电路组成。
当物体发生位移时,电阻元件的长度或截面积会发生变化,从而导致电阻值的变化。测量电路可以通过测量电阻值的变化来确定物体的位移量。压电位移计:压电位移计利用压电效应来测量位移。压电材料具有特殊的电荷分布结构,当施加力或压力时,会产生电荷的不均匀分布,从而产生电势差。通过测量电势差的变化,可以确定物体的位移量。拉线位移计:拉线位移计利用拉线的伸缩来测量位移。它通常由一个固定的参考点、一个可移动的测量点和一根连接两者的拉线组成。当物体发生位移时,拉线会伸缩,从而导致测量点相对于参考点的位置变化。通过测量拉线的伸缩量,可以确定物体的位移量。 视觉位移计资料