商机详情 -
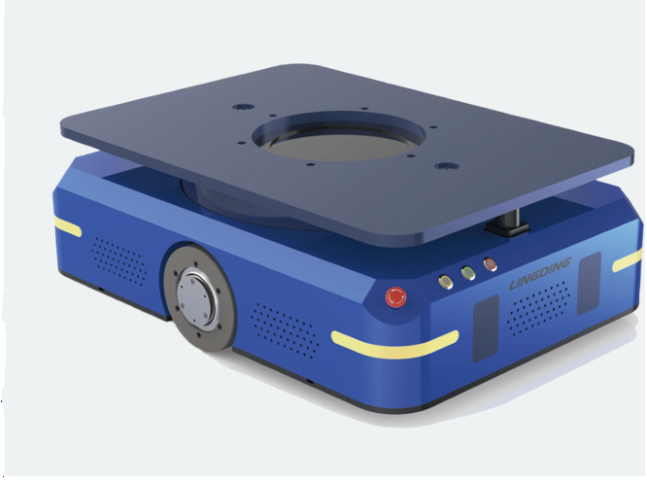
浙江新能源汽车电池AGV
为了实现AGV自主导航,需要根据多种传感器识别多种环境信息:如道路边界、地形特征、障碍、引导者等。AGV通过环境感知确定前进方向中的可达区域和不可达区域,确定在环境中的相对位置,以及对动态障碍物运动进行预判,从而为局部路径规划提供依据。目前,多传感器信息融合技术已经被应用于AGV导航系统中,其所起的作用关系着机器人的智能化水平。这种技术的**在于可以有效地对多传感器收集到的信息进行处理和融合,提高AGV自身对于不确定信息的抵抗能力,确保有更多可靠的信息被利用,有助于AGV更为直观地判断出周围的环境。AGV车辆在物流园区中高效运输货物。浙江新能源汽车电池AGV
衡量AGV性能好坏的主要指标有:导航系统、驱动装置、转向装置、精确停车装置、运动控制器、蓄电池和充电系统、通讯装置、移栽装置等。在对AGV进行选型前,我们需要对现场物料情况进行详细的了解,主要在以下几点:物料的搬运方式;物料的尺寸及重量/物料车的尺寸;定位精度的要求;工作周期的要求;实际现场工作环境;了解到这些信息后,再对AGV进行具体选型是比较合适的。所谓合适,是在满足自动化物流系统、实际工艺生产的要求及使用场合前提下的一个说法,也是实现AGV小车的应用比较好性价比。AGV的选型主要包括基本参数和性能指标的选择、导航方式的选择、移栽方式的选择,在能够保证高效地完成各种自动化搬运的同时获得相对较高的性价比。深圳科研实验室AGVAGV小车通过磁条导航实现稳定运行。

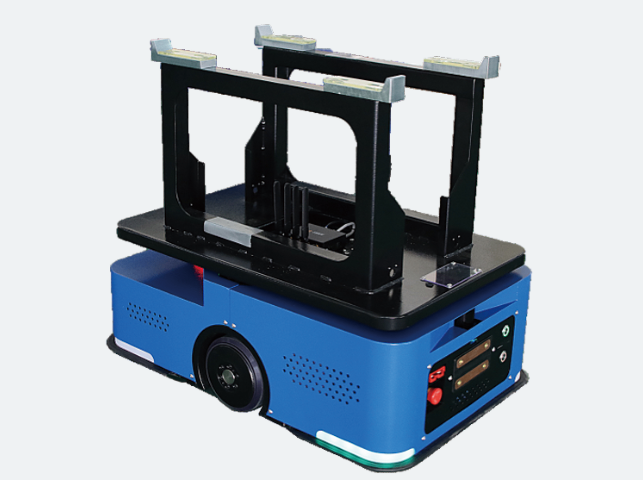
潜伏顶升式AGV的能源管理系统关乎其续航能力与工作持久性。一般配备高性能锂电池或铅酸电池,并结合智能充电管理技术。在工作间隙或低电量时,它能够自动前往充电区域进行充电,无需人工干预。一些先进的潜伏顶升式AGV还具备能量回收功能,例如在减速制动过程中,将部分动能转化为电能储存起来,进一步延长了电池续航里程。在大型工厂或物流中心,多台潜伏顶升式AGV协同工作,合理的能源管理确保了整个物流搬运系统的稳定运行,减少因设备电量不足而造成的生产中断风险。
当前,复合导航是AGV导航的主要创新方向,其中惯性+视觉导航**为主流。该组合导航技术通过CCD传感器感知环境,由计算机对图像进行处理分析,获取载体的位置和姿态等导航信息,进而修正惯性误差。一方面,视觉导航为惯性导航提供误差补偿信息,弥补了惯性误差随时间漂移的不足;另一方面,惯性导航凭借系统数据更新率高、不受光照等环境影响、短时定位精度高的优势,弥补了视觉导航处理实时性不足的缺陷。如海康机器人公司自主研发的阡陌仓储机器人,采用二维码视觉导航+惯性导航双导航技术,实现自主定位,定位精度误差小于5mm,稳定高效,可智能协调作业,大幅提升运维及管理效率。欧铠公司***研制的小精灵机器人是一款专门针对工厂内简单轻型的物料搬运的产品。它采用惯性+二维码视觉导航,不仅小巧灵活,而且精度高、速度快,集自动躲避障碍物、自由规划路线、姿态保持等强大功能于一身,**提高仓库作业效率。AGV技术推动了物流行业的智能化转型。
AGV电池储存条件电池需要长期储存时,请将电池充电至60%左右电量,放置于干燥、通风处,每三个月用充电器对电池充电3小时。充电电流为0.1C5A。电池组与充电器应储存在清洁、干燥、通风处,避免与腐蚀性物质解除,远离火源和热源。电池使用注意事项勿将电池投入水中或将其浸湿!严禁对AGV进行过充、过放电!禁止在火源或极热条件下给电池充电!勿在热源(如火或加热器)附近使用或者储存电池!如果电池泄露或者发出异味,应立即将其从接近明火处移开。***次使用电池,需将电池充满电后再使用。禁止将电池的正负极输出端接反!禁止用导线或者其他金属物体将电池正负极短路连接!禁止用钉子或者其他尖锐物体刺穿电池外壳,禁止锤击或者脚踏电池!禁止以任何方式分解电池!禁止将电池置于微波炉或者压力容器中!如果电池发出异味,发热,变形,变色或者出现其他任何异常现象时均应立即停止使用。AGV在钢铁行业中运输重型材料。浙江纺织行业AGV哪个好
AGV小车能够自动调整路径,适应动态环境。浙江新能源汽车电池AGV
AGV是自动导引车(AutomatedGuidedVehicle)的英文缩写。AGV是一种特殊的轮式移动机器人,它具备电磁学或光学等自动导引装置,能够沿规定的导引路径行驶。AGV的主要功能包括精确导航、安全保护以及各种移载功能。它通常由电池提供动力,并装有非接触导引装置,能够在计算机监控下,按照预设的路径规划和作业要求,自动行驶并停靠到指定地点,完成一系列作业功能。AGV的应用非常***,包括工业生产、物流运输、医疗保健、商业服务等领域。浙江新能源汽车电池AGV