商机详情 -
成都需求分析系统建模好用的软件
仿真验证MBD好用的软件需具备多领域模型的集成能力,能对汽车、工业自动化等领域的复杂系统进行多面验证。软件应支持故障注入、边界条件测试等功能,模拟极端工况下的系统响应,如汽车制动系统在不同路面附着系数下的表现、工业机器人在关节故障时的应急响应,通过量化分析评估系统的可靠性与安全性。同时,软件需提供丰富的数据分析工具,支持仿真结果与设计指标的自动比对,生成包含误差分析、优化建议的详细验证报告,为系统迭代优化提供准确依据,且能记录验证过程数据,满足追溯性要求。甘茨软件科技(上海)有限公司在系统模拟仿真等方面有成功案例,其开发的仿真验证MBD软件可满足相关领域的验证需求,为客户提供有效的工具支持。高校基础研究MBD开发优势,在于将理化生物过程具象化,便于直观分析与成果转化。成都需求分析系统建模好用的软件
算法原型工程化转化基于模型设计国产平台需架起理论算法与实际应用的桥梁,支持算法模型的模块化封装与代码生成。平台应能将控制算法、信号处理算法等原型转化为可执行的模型,通过仿真验证算法在实际工况下的性能,如工业控制中的PID算法、新能源汽车中的电池均衡算法,经平台转化后可直接生成适配目标硬件的代码,减少人工转化的误差与周期。平台还需提供算法优化工具,根据硬件资源约束调整模型参数,支持算法复杂度与运行效率的平衡分析,确保工程化后的算法既能满足功能需求,又能适配硬件的计算能力与存储限制。甘茨软件科技(上海)有限公司专注自主品牌工业软件开发,在算法仿真等成功案例中积累了经验,其国产平台可助力算法原型工程化转化基于模型设计的实现。杭州自动驾驶基于模型设计哪个开发公司靠谱汽车控制器软件MBD服务商,需提供从建模到代码生成的全流程支持,保障高效协同。

车载通信系统建模聚焦于车内各类网络的信号传输逻辑与可靠性验证,覆盖CAN/LIN总线、车载以太网等多种通信方式。CAN总线建模需定义报文ID、数据长度与传输周期,通过构建总线调度模型,计算不同节点(如发动机ECU、ABS控制器)的报文发送错误概率,优化总线负载率以确保关键信号(如制动指令)的实时性。LIN总线建模针对车身电子等低速率场景,模拟主从节点的通信协议,验证灯光、雨刮等控制信号的传输延迟,避免因通信延迟导致的功能异常。车载以太网建模则需考虑高带宽需求,构建通信协议栈模型,仿真自动驾驶多传感器(激光雷达、摄像头)的海量数据传输过程,分析网络拥塞对数据同步的影响。建模过程需整合通信硬件特性(如传输速率、抗干扰能力),通过仿真模拟电磁干扰、线束阻抗变化等工况,验证通信系统的容错能力,确保车内信号传输的稳定性与安全性。
机械臂DH参数建模MBD借助图形化建模工具,将机械臂的连杆长度、关节转角、连杆偏距等结构参数转化为规范化的运动学模型,实现对机械臂运动轨迹的准确仿真。在建模过程中,按照DH法则确立各连杆的坐标系,通过矩阵运算构建相邻关节间的变换关系,从而自动求解机械臂末端执行器在三维空间中的位姿。基于MBD流程,可对DH参数进行参数化调整,仿真不同参数组合下机械臂的工作空间范围与运动灵活性,快速筛选出符合设计需求的结构参数。对于多关节机械臂,需构建包含全部DH参数的整体运动学模型,考虑关节间的耦合效应,模拟复杂运动轨迹下各关节的角度变化曲线,为轨迹规划算法的开发提供精确的仿真对象,同时可衔接动力学分析模块,计算不同运动状态下的关节驱动力矩,为机械臂的结构优化与驱动选型提供数据支撑。汽车领域MBD优势体现在全流程,从控制器到整车仿真靠模型串联,迭代快且少出岔子。
机器人领域基于模型设计(MBD)工具需适配多域控制特性,涵盖动力学建模、控制算法设计与代码生成功能。动力学建模工具应能构建机械臂DH参数模型,自动计算运动学正逆解,模拟不同关节角度下的末端位置,支持重力补偿、摩擦力矩等动力学特性分析,为控制算法设计提供精确植物模型。控制算法设计工具需具备图形化建模能力,支持PID控制、模型预测控制(MPC)等算法的搭建与仿真,可快速验证轨迹跟踪、力控柔顺等控制策略效果——如协作机器人开发中,能模拟人机交互时的力反馈控制逻辑。代码生成工具需能将控制模型转化为可在ROS/RTOS等机器人控制器上运行的实时代码,支持代码优化以满足毫秒级甚至微秒级控制周期需求。此外,支持多工具联合仿真的工具更具优势,能实现动力学模型与控制算法模型的无缝集成,验证整个机器人系统的动态响应,保障MBD流程的连贯性与有效性。应用层软件开发系统建模用MBD思路,可边建模边仿真,及时发现问题,比传统方式省心。天津需求分析MBD
汽车领域MBD建模服务价格,需结合建模复杂度与服务范围,合理定价且保障服务质量更关键。成都需求分析系统建模好用的软件
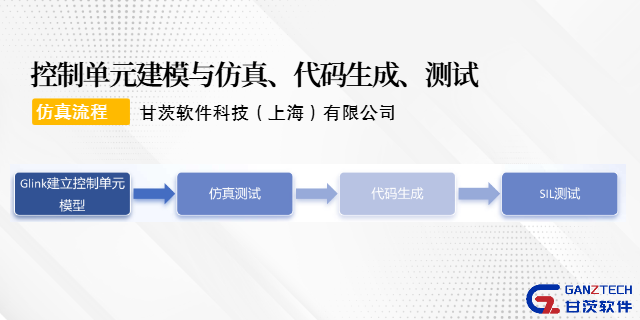
汽车控制器软件基于模型设计(MBD)是将控制逻辑以图形化模型形式表达的开发方法,贯穿从需求分析到代码生成的全流程。在发动机控制器ECU开发中,工程师可通过搭建燃油喷射、点火控制的可视化模型,直观呈现不同转速下的控制策略,避免传统手写代码的逻辑漏洞。整车控制器VCU开发中,MBD能整合动力系统参数,构建能量分配策略模型,模拟不同驾驶模式下的扭矩输出与能量回收效果,通过模型仿真提前验证控制逻辑的合理性。对于域控制器等复杂系统,MBD支持模块化建模,各功能模块可单独开发与测试,再通过模型集成验证模块间的交互逻辑,减少系统级缺陷。这种方法还支持早期虚拟测试,在物理样机制作前通过模型在环(MIL)仿真发现设计问题,大幅缩短开发周期,同时为后续的软件在环(SIL)、硬件在环(HIL)测试奠定基础,确保控制器软件的可靠性。成都需求分析系统建模好用的软件