产品中心



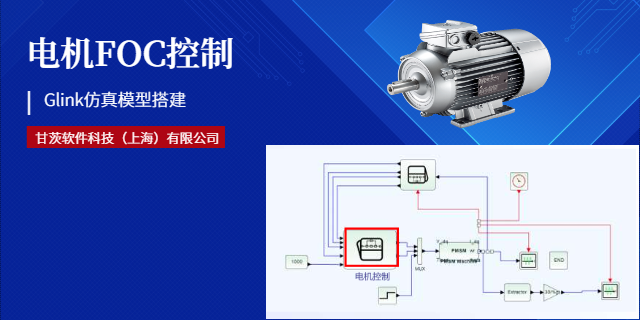
车辆动力系统仿真测试软件专注于发动机、电机、变速箱等部件的协同性能验证,可构建完整的动力传递链路模型。软件需支持传统燃油车动力匹配...
机器人运动控制算法是实现准确动作的关键,通过轨迹规划与动态调节确保操作精度与安全性。轨迹规划阶段生成平滑路径,采用多项式插值避免运...
PID控制算法根据应用场景与调节方式的差异,形成多种细分类型。常规PID包含比例、积分、微分三个环节,参数固定,适用于简单线性系统...

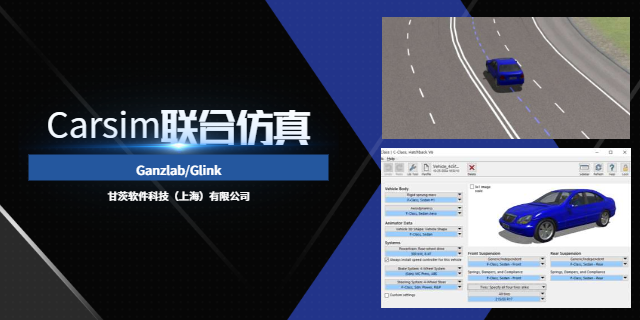
汽车模拟仿真测试软件需具备多场景覆盖能力与多维度验证功能,适配不同系统的测试需求。针对动力系统,软件应能仿真动力输出、能耗水平等性...
PID控制算法基于比例、积分、微分三个环节的协同作用实现闭环控制,其逻辑是通过对偏差的动态处理消除系统误差,适用于多种被控对象。比...
整车动力性能仿真验证需构建涵盖动力系统与整车行驶特性的完整模型,通过多工况仿真评估车辆的动力输出能力与响应特性。仿真需准确输入发动...

机器人运动控制器算法是协调机器人各关节动作、实现准确运动的关键,涵盖轨迹生成与闭环控制两大环节。轨迹生成阶段,算法根据目标位置与运...
底盘控制汽车仿真软件需具备底盘系统建模与控制算法验证的综合能力。好用的软件应能搭建制动、转向、悬架系统的高精度模型,如ABS系统的...
甘茨软件科技(上海)有限公司成立于2014年,是一家专注于自主品牌工业软件设计、开发、服务与推广的软件及工程咨询公司。我们一直以来都致力于为制造业客户和产品研发机构提供基于工业化软件应用的IT及工程服务解决方案。公司总部设在上海,并在深圳、西安、成都、长春设立了分公司。目前公司拥有一支具有多年丰富经验的技术团队,专注于向国内客户提供集成化的现代产品研发解决方案和专项工程服务,为传统制造业企业进行数...
查看更多