商机详情 -
青海电磁特性仿真验证测试选什么软件
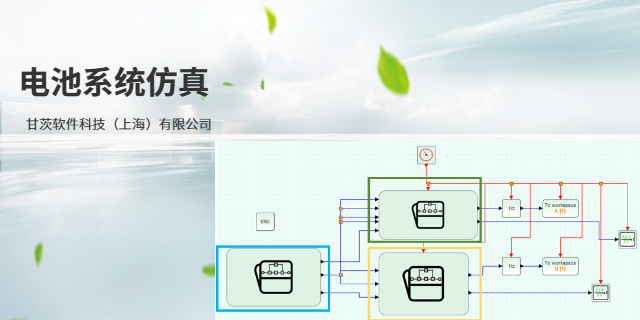
自动驾驶汽车模拟仿真通过构建虚拟测试场,复现海量交通场景以验证系统的感知、决策与控制能力。感知层仿真需模拟摄像头、激光雷达在不同光照、天气下的原始数据,包含噪声、畸变等真实特性,测试传感器融合算法的目标识别精度;决策层则通过状态机模型模拟车道保持、紧急避让等逻辑,在千级以上场景中验证决策策略的安全性。控制层需结合车辆动力学模型,测试转向、制动指令的执行效果,确保轨迹跟踪误差在合理范围。仿真过程中可注入传感器失效、通信延迟等故障,多方位评估系统的容错能力,为自动驾驶算法迭代提供高效验证手段。电池系统模拟仿真控制工具,需准确复现充放电逻辑,为能量管理与安全控制提供支持。青海电磁特性仿真验证测试选什么软件
自动驾驶汽车仿真测试软件需构建覆盖感知、决策、控制全链路的虚拟测试环境。软件应能生成多样化场景库,包含不同路况、天气与交通参与者,支持激光雷达、摄像头等传感器的仿真,模拟其在复杂环境下的信号特性(如噪声、畸变、不同光照下的图像效果)。决策层测试需支持路径规划、行为预测算法的验证,分析不同场景下的决策安全性;控制层则需结合车辆动力学模型,测试转向、制动指令的执行效果。软件还应具备场景回放与数据分析功能,量化算法的性能指标,为自动驾驶系统(尤其是L2+级辅助驾驶)的迭代优化提供可靠依据。江西整车协同仿真验证软件服务商汽车控制器应用层软件开发服务商,需具备控制逻辑转化与仿真验证的综合能力。
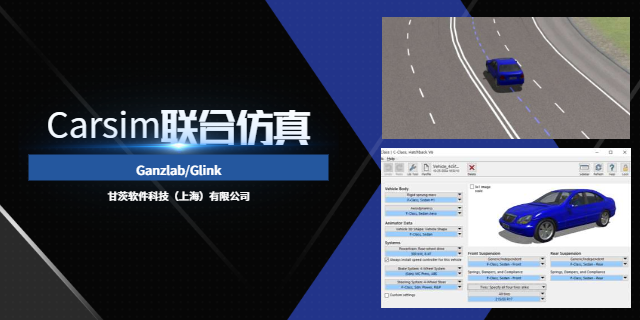
汽车联合仿真建模软件通过标准化接口实现多域模型的无缝集成,支持整车性能的跨学科协同优化。软件需兼容多体动力学、流体力学、控制算法等不同类型模型,定义统一的数据交互格式,实现不同工具的联合仿真。在底盘开发中,可将悬架多体模型与PID控制模型联合,分析控制参数对操纵稳定性的影响;动力系统开发中,能整合发动机热力学模型与变速箱动力学模型,优化换挡时机与动力输出。软件应具备高效的协同仿真引擎,支持分布式计算以提升大规模模型的求解速度,为整车多目标优化(如动力性与经济性平衡)提供强大技术支撑。
动力系统仿真验证的主要是通过数字化手段分析发动机、电机、变速箱等部件的协同运作,实现整车动力性能与能耗的双重优化。对于传统燃油车来说,仿真的重点在于验证发动机和变速箱的匹配效果,通过计算不同转速区间的动力输出强度和燃油消耗情况,调整换挡时机与逻辑,让车辆行驶时的动力衔接更顺畅。新能源汽车的仿真则要把电机、电池和减速器的模型整合到一起,模拟运动、节能等不同驾驶模式下的扭矩分配方式,测算能量回收系统能回收多少电能,同时还要检验车辆在急加速、爬陡坡等工况下的动力响应是否及时。通过模拟各种复杂工况,能提前找出动力系统搭配中的问题,比如换挡时动力中断、能耗过高之类的情况,再结合实车测试收集到的数据不断优化仿真模型,为调整动力系统参数、改进控制策略提供数据依据,让动力系统设计更合理。整车制动性能仿真可模拟不同路况下的制动距离与跑偏,为参数优化提供依据。

整车协同汽车模拟仿真通过整合车身、底盘、动力、电子等多系统模型,实现对整车性能的综合分析与优化。在仿真过程中,需考虑各系统间的动态耦合关系,如底盘悬架特性对动力传递效率的影响、车身重量分布对操纵稳定性的作用、电子控制系统对动力输出的调节效果。针对整车经济性,协同仿真可结合发动机油耗模型、电机效率模型与行驶阻力模型,计算不同车速下的能量消耗;对于安全性,能模拟碰撞工况下车身结构的受力分布与约束系统的保护效果。通过整车协同仿真,可在设计阶段多方位评估各系统参数对整车性能的综合影响,避免出现单一系统优化导致的整体性能失衡,实现整车性能的全局优化与开发效率的提升。汽车模拟仿真定制开发需理解企业需求,从建模到流程均做针对性设计调试。江西整车协同仿真验证软件服务商
自动驾驶汽车仿真测试软件需模拟复杂路况,以验证算法在多样场景下的可靠性。青海电磁特性仿真验证测试选什么软件
整车操纵稳定性仿真验证项目报价依据仿真精度、工况数量及交付成果而定。基础报价涵盖标准工况仿真,如蛇形试验、稳态回转测试、转向回正性试验,基于通用车辆参数库建模,输出横摆角速度、侧倾角、转向力等基础指标,包含多种典型载荷状态的仿真结果;高阶报价包含个性化工况定制,如极限侧滑工况、不同载荷分布下的操纵性分析、恶劣天气路面的行驶稳定性测试,需构建高精度多体动力学模型,结合实车测试数据校准参数,包含各种工况的对比分析。报价还涉及报告交付形式,只提供数据清单的基础服务价格较低,包含仿真动画、优化方案及工程师解读的增值服务价格相应上浮,整体费用需根据项目复杂度阶梯式核算。青海电磁特性仿真验证测试选什么软件