商机详情 -
山东自动驾驶汽车仿真项目报价
电磁特性仿真验证与实车测试的误差主要源于模型简化与环境因素模拟的局限性,但通过技术优化可控制在合理范围。仿真需构建电机、电控系统的电磁模型,考虑磁饱和、涡流损耗等非线性特性,模拟不同工况下的磁场分布与电磁力变化。误差来源包括:忽略细微结构对磁场的影响、材料参数与实际存在偏差、环境温度对电磁特性的动态影响等。通过引入高精度有限元算法、采用实车测试数据校准模型参数,可将关键指标(如电机输出扭矩、效率)的误差控制在可接受范围,满足工程开发需求。甘茨软件科技(上海)有限公司在永磁同步电机控制仿真方面有成功案例,其在电磁特性仿真验证领域的经验可有效缩小与实车测试的误差。新能源汽车仿真测试软件的选择,需关注其对电池、电驱等系统的适配性及测试流程的完整性。山东自动驾驶汽车仿真项目报价
汽车仿真与实车测试的误差主要源于模型简化、参数精度与环境模拟的局限性,但通过技术优化可将误差控制在合理范围。模型简化会导致一定偏差,如忽略次要零部件的微小惯性力或复杂的流体扰动;参数准确性(如轮胎摩擦系数、空气阻力系数)直接影响仿真结果,需通过实车数据校准提升精度;环境模拟(如风速、路面不平度)的随机性也可能带来误差。在工程实践中,通过高保真建模、多源数据融合校准模型参数,结合机器学习算法优化仿真逻辑,可使关键性能指标(如加速时间、制动距离)的仿真误差降低到减低的程度,完全满足开发需求。西藏自动驾驶仿真验证实施方案动力系统模拟仿真基于多物理场耦合模型,复现动力输出与能耗的动态关系。
整车协同汽车模拟仿真通过整合车身、底盘、动力、电子等多系统模型,实现对整车性能的综合分析与优化。在仿真过程中,需考虑各系统间的动态耦合关系,如底盘悬架特性对动力传递效率的影响、车身重量分布对操纵稳定性的作用、电子控制系统对动力输出的调节效果。针对整车经济性,协同仿真可结合发动机油耗模型、电机效率模型与行驶阻力模型,计算不同车速下的能量消耗;对于安全性,能模拟碰撞工况下车身结构的受力分布与约束系统的保护效果。通过整车协同仿真,可在设计阶段多方位评估各系统参数对整车性能的综合影响,避免出现单一系统优化导致的整体性能失衡,实现整车性能的全局优化与开发效率的提升。
车辆动力系统仿真测试软件专注于发动机、电机、变速箱等部件的协同性能验证,可构建完整的动力传递链路模型。软件需支持传统燃油车动力匹配仿真,模拟不同变速箱档位下的发动机动力输出特性,计算加速时间、最高车速等动力指标,同时分析换挡过程中的动力中断时间与冲击度;针对新能源汽车,能整合电机效率Map、电池SOC特性,仿真动力系统在不同驾驶模式下的扭矩分配策略,分析能量回收效率对续航的影响,支持快充、慢充等充电场景的动力响应模拟。测试模块需包含故障注入功能,可模拟传感器失效、电机扭矩波动等异常工况,验证动力系统的容错能力,同时生成可视化的仿真报告,为动力系统参数优化提供数据支撑。汽车软件测试仿真验证应按模块到集成的流程进行,确保测试完整且结果准确。

底盘控制仿真验证主要是通过虚拟测试的方式,检验制动、转向、悬架这三大系统控制策略的实际效果,整个过程需要搭建底盘部件与控制算法之间的闭环仿真模型。制动系统的验证要模拟湿滑路面刹车、突发情况避让等场景,看ABS/ESP系统的反应速度,计算车辆制动距离和车身姿态的变化,判断制动力分配是否合理,会不会影响制动时的稳定性。转向系统的验证要盯着助力特性、传动比这些参数对驾驶操控的影响,研究怎么改善转向迟滞的问题,同时评估不同车速下转向的轻重程度和路感反馈是否符合驾驶习惯。悬架系统的验证则要模拟车辆经过铺装路、碎石路、减速带等不同路面时的情况,看阻尼调节能不能有效抑制车身震动,提升乘坐舒适性,还要找到悬架刚度和车辆操控稳定性之间的平衡点。验证时必须考虑极端温度、车辆载荷变化等各种边界条件,确保底盘控制策略在任何使用场景下都能稳定可靠。汽车模拟仿真测试软件的选择,应依据测试目标与系统类型,匹配相应功能模块。山东自动驾驶汽车仿真项目报价
整车动力性能仿真验证需模拟加速、爬坡等场景,通过数据对比优化动力参数,支撑性能提升。山东自动驾驶汽车仿真项目报价
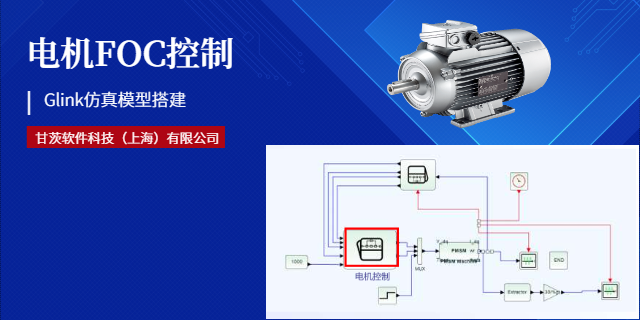
动力系统汽车模拟仿真技术基于多物理场耦合与控制理论,通过数学建模复现动力传递与能量转换过程。其重点是构建各部件的机理模型:发动机模型基于热力学方程计算进气量、喷油量与输出扭矩的关系,包含节气门开度、点火提前角等关键参数的影响;电机模型通过电磁方程模拟电流、转速与扭矩的动态响应,考虑磁饱和、涡流损耗等非线性特性;变速箱模型则依据齿轮传动比与效率特性计算动力传递损耗,包含换挡过程中的离合器结合/分离动态模拟。仿真过程中通过控制算法模型(如发动机ECU逻辑、电机FOC控制)实现各部件协同,求解动力系统在不同输入下的动态响应,通过数值计算输出动力性能指标,为动力系统设计提供理论依据。山东自动驾驶汽车仿真项目报价