商机详情 -
天津汽车基于模型设计哪个开发公司靠谱
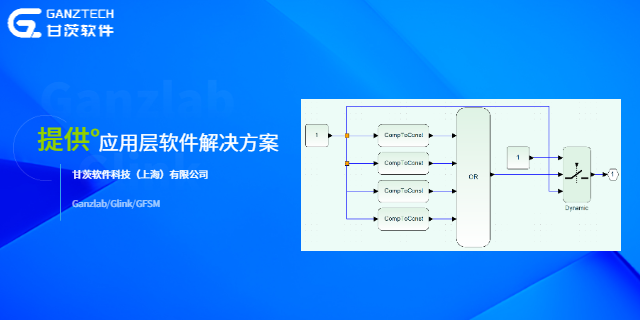
应用层软件开发系统建模是将软件功能需求转化为可执行模型的过程,为复杂系统开发提供结构化框架。在汽车电子应用层开发中,针对车身电子控制模块,建模需明确灯光控制、门窗调节等功能的状态转换逻辑,通过状态机模型定义不同输入信号(如遥控指令、车内按键)对应的执行动作,确保功能逻辑的完整性。发动机控制器应用层建模则需整合传感器信号处理、执行器驱动逻辑,将空燃比控制、怠速调节等算法转化为模块化模型,各模块通过清晰的接口传递数据,便于团队协作开发。建模过程需考虑软件的可扩展性,采用标准化的模型架构,使新增功能(如自适应巡航辅助)能快速集成到现有模型中。通过系统建模,可在开发早期梳理功能边界与交互关系,减少后期集成阶段的接口矛盾,同时为自动代码生成提供可靠的模型基础,提升应用层软件的开发效率与质量。智能交通系统基于模型设计的软件,可整合流量模型与控制逻辑,优化信号策略,提升效率。天津汽车基于模型设计哪个开发公司靠谱
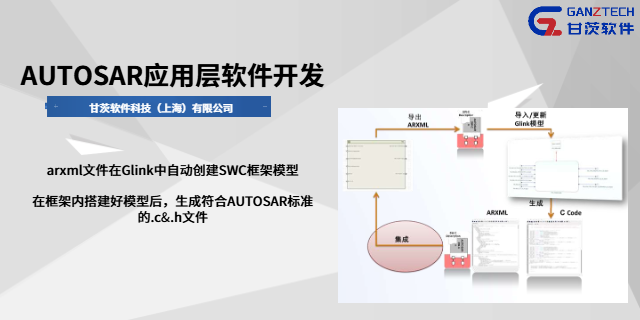
应用层软件开发基于模型设计的专业公司需具备丰富的模块化建模经验与行业适配能力。专业公司应能根据汽车电子、工业自动化等领域的应用场景,构建符合行业标准的模型架构,如汽车车身电子控制中的灯光、门窗模块,通过清晰的接口设计实现功能逻辑的快速搭建。在服务过程中,能提供从需求分析到模型验证的全流程支持,指导工程师运用状态机、数据流图等建模方法,确保应用层软件的逻辑完整性与可扩展性,同时支持自动代码生成与硬件平台的适配。甘茨软件科技(上海)有限公司为制造业客户提供基于工业化软件应用的解决方案,在算法仿真等方面有成功案例,在应用层软件开发基于模型设计领域具备专业服务能力。河北车载通信MBD有什么用途应用层软件开发系统建模好用的软件,能融合控制逻辑与仿真验证,建模时可直接看效果。

电子与通讯领域MBD的优势体现在缩短开发周期、提升系统可靠性与简化复杂协议验证上。在5G基带开发中,通过图形化建模可将复杂的信号处理算法分解为模块化模型,工程师能专注于调制解调、信道编码等逻辑设计,通过早期仿真发现算法缺陷,减少后期硬件测试的调试成本,使开发周期缩短。通讯协议栈验证方面,MBD支持协议状态机的可视化建模,能模拟不同网络环境下的协议交互过程,精确计算报文传输的延迟与丢包率,提前发现协议设计中的漏洞,提升通讯系统的抗干扰能力。对于嵌入式通讯设备,MBD工具可从模型自动生成高效的嵌入式代码,代码符合行业规范且具备可追溯性,降低手动编码的错误率,同时支持代码与模型的一致性校验,确保产品的功能正确性。多团队协作时,标准化的模型格式能消除不同开发工具间的壁垒,使硬件设计、软件算法、测试验证团队基于同一模型开展工作,提升整体开发效率。
汽车控制器软件MBD服务商的推荐,需重点考察其在控制器开发全流程的技术支撑能力。服务商应能提供从需求分析到代码生成的完整解决方案,在发动机控制器ECU开发中,可协助构建燃油喷射、点火控制的精细化模型,支持不同工况下的控制策略仿真验证。针对整车控制器VCU,服务商需具备能量管理策略建模经验,能整合电机、电池参数,模拟混动模式切换时的动力平顺性,优化扭矩分配算法。在工具链支持方面,应熟悉主流MBD工具的应用特性,能指导工程师完成模型在环(MIL)、软件在环(SIL)到硬件在环(HIL)的全流程测试,确保模型与代码的一致性。推荐的服务商还需具备功能安全工程经验,拥有丰富的车型项目案例,验证其在不同控制器开发场景中的适配能力。甘茨软件科技通过了ISO26262道路车辆安全管理体系ASIL-D认证,作为AUTOSAR组织开发合作伙伴,在汽车控制器软件MBD服务中具备专业优势,可提供贴合行业需求的技术支持。MBD开发公司好不好,看能否提供全流程支持,保障建模、仿真与部署顺畅协同,满足多样需求。
汽车控制器软件基于模型设计(MBD)是将控制逻辑以图形化模型形式表达的开发方法,贯穿从需求分析到代码生成的全流程。在发动机控制器ECU开发中,工程师可通过搭建燃油喷射、点火控制的可视化模型,直观呈现不同转速下的控制策略,避免传统手写代码的逻辑漏洞。整车控制器VCU开发中,MBD能整合动力系统参数,构建能量分配策略模型,模拟不同驾驶模式下的扭矩输出与能量回收效果,通过模型仿真提前验证控制逻辑的合理性。对于域控制器等复杂系统,MBD支持模块化建模,各功能模块可单独开发与测试,再通过模型集成验证模块间的交互逻辑,减少系统级缺陷。这种方法还支持早期虚拟测试,在物理样机制作前通过模型在环(MIL)仿真发现设计问题,大幅缩短开发周期,同时为后续的软件在环(SIL)、硬件在环(HIL)测试奠定基础,确保控制器软件的可靠性。工业控制系统建模MBD,以模型串联控制逻辑设计与仿真,可提前发现问题,让系统运行更稳定。天津汽车基于模型设计哪个开发公司靠谱
汽车控制器软件MBD好用的软件,需支持图形化建模与自动代码生成,适配多类控制器开发。天津汽车基于模型设计哪个开发公司靠谱
机械臂DH参数建模MBD借助图形化建模工具,将机械臂的连杆长度、关节转角、连杆偏距等结构参数转化为规范化的运动学模型,实现对机械臂运动轨迹的准确仿真。在建模过程中,按照DH法则确立各连杆的坐标系,通过矩阵运算构建相邻关节间的变换关系,从而自动求解机械臂末端执行器在三维空间中的位姿。基于MBD流程,可对DH参数进行参数化调整,仿真不同参数组合下机械臂的工作空间范围与运动灵活性,快速筛选出符合设计需求的结构参数。对于多关节机械臂,需构建包含全部DH参数的整体运动学模型,考虑关节间的耦合效应,模拟复杂运动轨迹下各关节的角度变化曲线,为轨迹规划算法的开发提供精确的仿真对象,同时可衔接动力学分析模块,计算不同运动状态下的关节驱动力矩,为机械臂的结构优化与驱动选型提供数据支撑。天津汽车基于模型设计哪个开发公司靠谱