商机详情 -
成都精密力控打磨
客户终端采用气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,专机打磨的刚性接触使得打磨效率低,圆度不一致的缺陷,有待于改善。DFC力控打磨安装在客户现有打磨专机上,保持圆棒匀速旋转通过滚筒线,在原有气动打磨机位置后,安装DFC力控打磨,在力控打磨执行器末端安装原有气动打磨机。按原有直线运动的轨迹实现柔性力控打磨,但是DFC力控打磨的柔性力控制功能使得快速移动的工件收到的打磨力在设定的力值范围内,使得原有的线性接触打磨为面接触打磨,使得不变化圆棒工件安装位置的情况下一次性柔性打磨,力控打磨效率高,工件打磨后的圆度一致性好。大儒科技(苏州)有限公司力于提供力控打磨 ,有想法的可以来电咨询!成都精密力控打磨
在工业制造领域,有很多零件需要在焊接、铸造、成型或加工后进行后处理,包括打磨,抛光。例如新能源汽车行业的电池托盘、变速箱壳体、汽车轮毂。目前大部分工件打磨加工作业大多采用机器人安装手持气动,电动工具进打磨,研磨等方式进行打磨加工,机器人缺乏打磨所需要的柔性力控制,容易导致产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题。普通的机器人机器人打磨的方案由于机械臂刚性,定位误差等其他因素,需要安装DFC实现力控打磨,使其柔性打磨,取得更好的均匀性和一致性。韶关官方力控打磨答疑解惑大儒科技(苏州)有限公司是一家专业提供力控打磨 的公司,有想法的可以来电咨询!

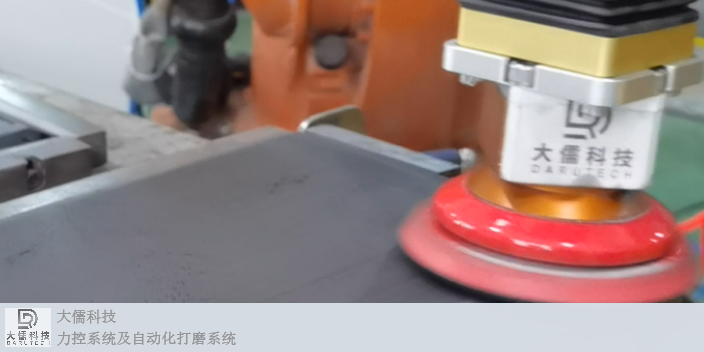
机器人在打磨及抛光领域应用越来越多,安装FDFC力控打磨实现的力控打磨工作台。当打磨机器人就位执行设置好的打磨路径,通过DFC力控打磨控制实时的打磨力,当工件与浮动抛光电机构的接触压力增大时,DFC力控打磨系统则减少推动力;当接触压力减少时则加大推动力。DFC力控打磨工作台进一步的提高了打磨质量,通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。本打磨系统通过浮动式抛光电机实现了在打磨过程中工件与磨具之间压力柔性且可控,所以相比于传统抛磨设备,本打磨系统中磨具磨损速度减轻,打磨机器人单次向前步进后,打磨工件数量较传统打磨设备有较大幅度的提高。针对一些表面稍复杂的工件,使磨具可以根据工件表面情况实现浮动,保证工件与磨具间的打磨压力。
在研磨加工中企业为了快速投产,通常用机器人来实现打磨作业,机器人打磨采用了DFC力控打磨系统,以及打磨工具、自动换砂纸设备。可以替代人工和去毛刺的机床设备,用于对铸件、钣金件、洁具、电脑笔记本、手机等壳体的打磨、去毛刺自动化加工。加装D力控打磨的机器人研磨自动化系统从加工零件和产品的表面快速有效地去除多余的材料。无论在什么行业,批量生产中有打磨工序,就不能没有自动化设备,而打磨工艺作业的非标准性及对打磨动作的灵活要求,成为通用打磨机的技术障碍。将打磨机、力控打磨系统DFC和机器人结合成为单个机器人打磨系统或完整的机器人打磨设备,辅以传输线和相应的夹具技术研发成完整的打磨工序自动化生产线,可高效完成非标准件的自动化力控打磨作业工艺。对不同材质的零件进行精密打磨本身就是一门科学。它要求生产商配备自动化力控打磨机、力控打磨系统、设备和生产线、打磨过程的专业知识、适当的打磨技术以及正确的打磨工序力控打磨 ,就选大儒科技(苏州)有限公司,用户的信赖之选,有想法可以来我司咨询!

大儒科技基于对研磨工艺和打磨抛光应用场景的深刻理解,研发设计了DFC智能柔性打磨抛光力控打磨,帮助企业实现自动化打磨,并取得更好的一致性和均匀性效果,提升良率,降本增效;智能柔性打磨解决方案以人为引导主体,以力控打磨为工具,以基于打磨工艺的控制算法和运动规划及控制算法为中心,使得机器人的操作更简单,让机器人打磨的应用更直观。智能柔性打磨力控打磨支持多种标准工业机器人,兼容ABB、KUKA、FANUC、安川、UR、爱普生、埃斯顿等多个国际、国内品牌机器人通讯协议,安装即用。DFC打磨力控打磨是通用型的柔性力控制工具,可实现所有材质表面的打磨、抛光、去焊缝、去毛刺、去除合模线、清洁等的自动化需求;普遍适用于3C、汽车、家具、家电、厨卫、航空航天、运动用品、新材料新能源等领域。力控打磨 ,就选大儒科技(苏州)有限公司,用户的信赖之选,有想法的不要错过哦!成都智能力控打磨详情
大儒科技(苏州)有限公司是一家专业提供力控打磨 的公司,有想法的不要错过哦!成都精密力控打磨
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。成都精密力控打磨