新闻中心 - 上海诺尚信息技术有限公司
-
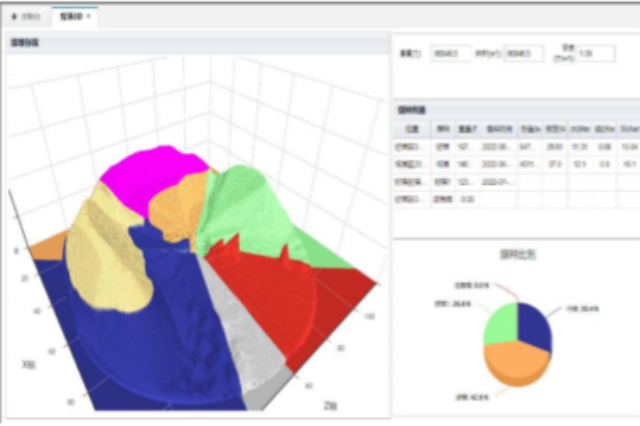 宁夏的组成数字煤场管控系统
宁夏的组成数字煤场管控系统煤矿生产数字煤场管控系统的解决方案专注于煤场管理的智能化与信息化,旨在提升企业的运营效率和安全保障。该方案通过构建三维数字煤场,实现对煤种及相关参数的分区管理,实时监测各存煤区域的煤量和温度状态。系统...
发布时间:2025.12.03 -
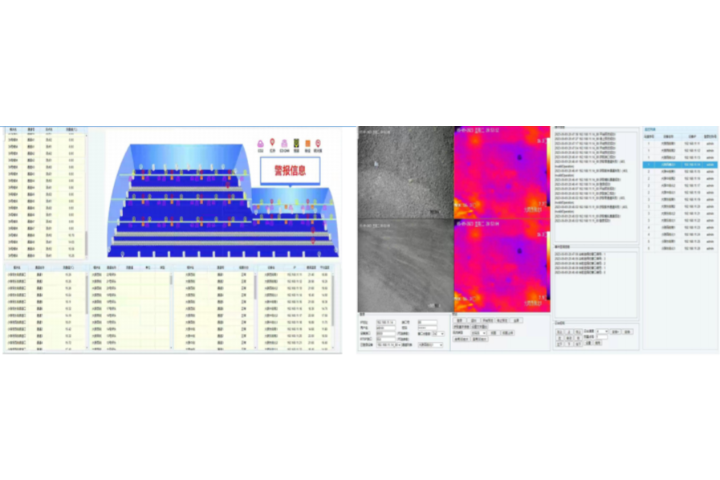
 河北工业安全监测系统自动监测预警
河北工业安全监测系统自动监测预警在燃煤电厂的日常运营中,安全监测系统扮演着至关重要的角色。针对燃煤电厂,工业安全监测系统的开发需要考虑多方面的因素,包括有毒气体、粉尘浓度、明火煤、红外温度等多种监测需求。燃煤电厂的环境复杂,温度和气...
发布时间:2025.12.02 -
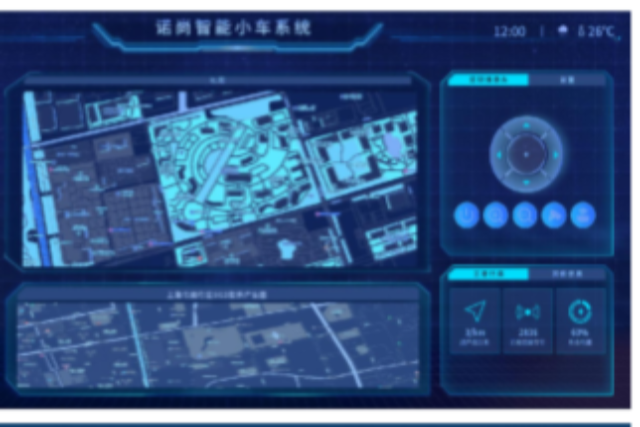 甘肃的组成地面轮式巡检机器人
甘肃的组成地面轮式巡检机器人在设备密集的室内场所,如机房和继电室,气体安全监测需求较为复杂。诺尚室内轮式升降巡检机器人集成了多种气体传感器,能够检测二氧化碳和六氟化硫等气体的浓度变化。机器人设计了灵活的移动系统和可调节的升降平台...
发布时间:2025.12.01 -
山西工业安全监测系统挡煤墙温度的优点
为发电集团安装工业安全监测系统是一个系统化的工程,需要经过精密的规划和执行。安装流程通常包括多个阶段:首先是现场勘查,了解发电厂的具体需求和工作环境;接着是系统设计,结合实际情况选择合适的传感器和监测...
发布时间:2025.11.30 -
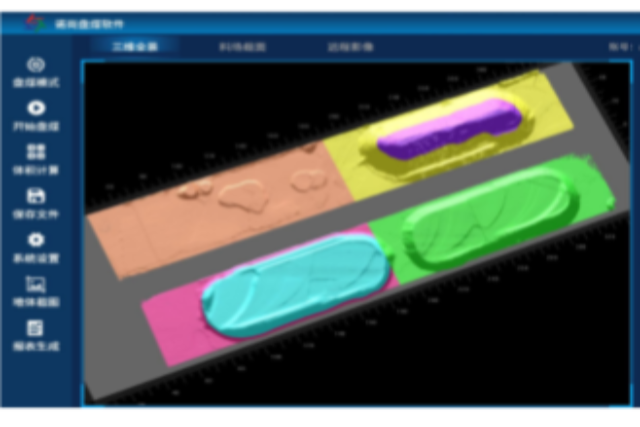
 陕西堆取料机无人值守系统自动堆料哪家好
陕西堆取料机无人值守系统自动堆料哪家好软件架构设计对无人值守系统的性能起着决定作用。该系统采用面向对象的客户端/服务器结构,利用C++语言及OpenGL图形库实现三维图形的高效渲染与数据处理。通过TCP/IP Socket与激光扫描设备建...
发布时间:2025.11.29 -
 河南廊道巡检机器人声音的组成
河南廊道巡检机器人声音的组成地面轮式巡检机器人在发电行业中承担着设备监测与异常预警的职责,其使用流程需结合具体场站环境合理规划巡检路径。诺尚的机器人配备3D激光导航传感器,能够构建场站的三维导航地图,支持复杂环境中的精确定位。通...
发布时间:2025.11.28 -
 安徽怎么样盘煤巡检机器人
安徽怎么样盘煤巡检机器人热像测温功能是室内轮式升降巡检机器人中的重要组成部分,专注于对关键设备温度的精确监控。机器人搭载的红外热像仪能够实时记录设备表面温度分布,自动识别异常热点,当温度超过预设阈值时发出警示,便于及时发现潜...
发布时间:2025.11.28 -
 湖北地面轮式巡检机器人气体监测
湖北地面轮式巡检机器人气体监测环境监测地面轮式巡检机器人在工业场站中发挥着重要作用,尤其适用于煤矿、石化及火电厂等复杂环境。该机器人集成多种传感器和高清摄像设备,能够连续采集设备外观、仪表读数、红外热成像、气体浓度、噪声及其他环境...
发布时间:2025.11.28 -
 陕西堆取料机无人值守系统条形控制台
陕西堆取料机无人值守系统条形控制台自动化堆取料作业中,安全急停功能扮演着重要的角色,保障设备与人员的操作安全。安全急停堆取料机无人值守系统利用激光扫描技术与三维数字模型,实时采集料堆形态及设备姿态,构建动态的三维图像和料堆信息库。系统...
发布时间:2025.11.27 -
 煤炭转运自动寻检工业安全监测系统
煤炭转运自动寻检工业安全监测系统设备自检测功能是室内轮式升降巡检机器人维护自身健康状态的重要保障。机器人在启动后会自动执行对电源系统、驱动机构、通信模块以及搭载传感器的检测,及时发现潜在异常。异常情况通过声光报警提示现场人员,并在通...
发布时间:2025.11.27 -
 北京工业安全监测系统料场红外温度开发
北京工业安全监测系统料场红外温度开发斗轮机工业安全监测系统的工作原理是基于先进的传感器技术和数据分析能力,旨在确保大型料场和发电集团的安全运行。斗轮机是煤矿和燃煤电厂中重要的设备,其运行状态直接影响到生产效率和安全性。监测系统通过传感器...
发布时间:2025.11.27 -
贵州工业安全监测系统集成平台
在大型料场中,工业安全监测系统的工作原理主要依赖于多种传感器的综合应用。这些传感器被 安装在料场的关键位置,用于监测温度、气体浓度以及粉尘等环境因素。系统通过无线网络将采集到的数据传输至监控室,便于...
发布时间:2025.11.27