-
 发电集团数据处理数字煤场管控系统
发布时间:2026.03.12
发电集团数据处理数字煤场管控系统
发布时间:2026.03.12
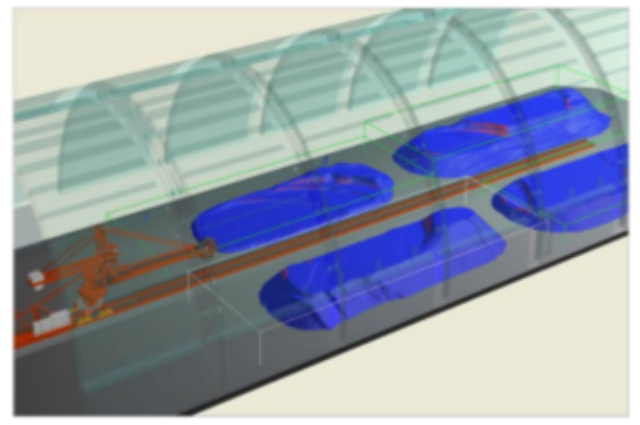
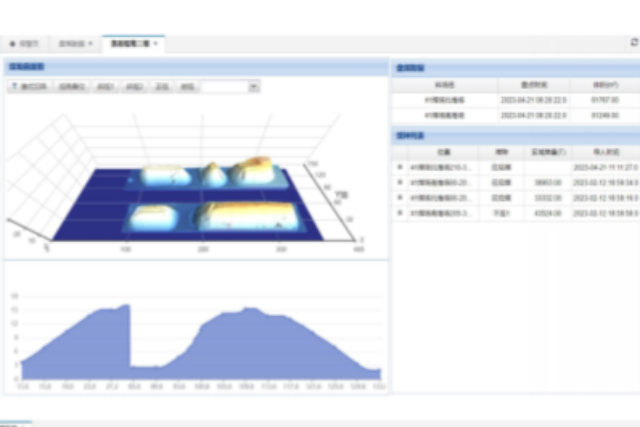
煤矿生产数字煤场管控系统的解决方案专注于煤场管理的智能化与信息化,旨在提升企业的运营效率和安全保障。该方案通过构建三维数字煤场,实现对煤种及相关参数的分区管理,实时监测各存煤区域的煤量和温度状态。系统...
-
 山东堆取料机无人值守系统GPS通讯技术
发布时间:2026.03.11
山东堆取料机无人值守系统GPS通讯技术
发布时间:2026.03.11
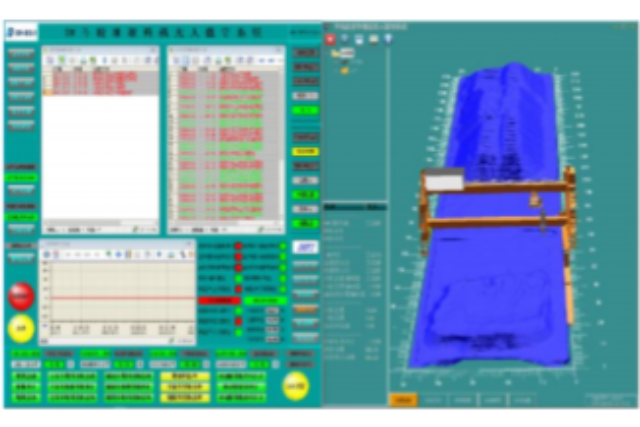
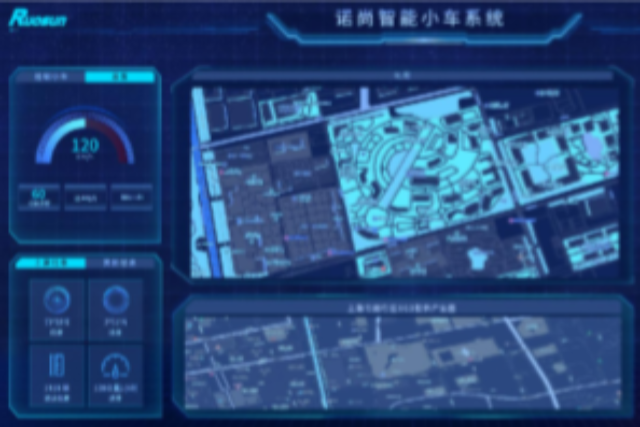
在散货堆场堆取料机无人值守系统中,控制台承担着连接操作人员与自动化设备的关键角色。设计过程中充分考虑了现场作业环境和用户操作习惯,配备了多功能操纵杆、按钮及选择开关,界面布局简洁,便于快速切换远程手动...
-
 陕西数字煤场管控系统存煤性价比
发布时间:2026.03.11
陕西数字煤场管控系统存煤性价比
发布时间:2026.03.11
煤矿与燃煤电厂的煤场管理面临诸多挑战,堆取料管理数字煤场管控系统针对这一需求,提供了解决方案,涵盖进煤、耗煤和存煤各环节。系统通过智能分区管理,将煤场划分为多个存煤区域,结合实时数据构建三维立体模型,...
-
 河南堆取料机无人值守系统散货堆场远程控制
发布时间:2026.03.10
河南堆取料机无人值守系统散货堆场远程控制
发布时间:2026.03.10
无线通信堆取料机无人值守系统的推广应用,促进了大型料场及煤矿生产自动化水平的提升,同时增强了安全管理的效率。操作人员通过远程操作台即可实现对堆取料机的精确控制,无需现场作业,降低了人力需求和作业风险。...
-
 广东堆取料机无人值守系统安全防护开发
发布时间:2026.03.09
广东堆取料机无人值守系统安全防护开发
发布时间:2026.03.09
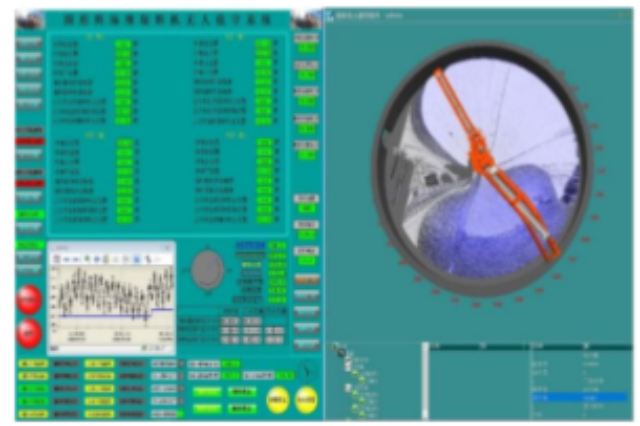
实时控制技术在燃煤电厂堆取料机无人值守系统中占据重要地位,直接影响作业的效率与安全。系统通过激光扫描仪和编码定位装置,实时采集料堆形态及堆取料机姿态信息,传输至中控系统进行时间同步处理,构建精确的三维...
-
海南多少钱堆取料机无人值守系统
发布时间:2026.03.08
大型料场的自动化堆取料作业对设备的安全性和运行效率提出了较高要求。安全防护堆取料机无人值守系统依托激光扫描技术,能够动态捕捉料堆的三维形态,进而将采集到的堆形数据发送至中控系统进行处理。主控PLC根据...
-
 陕西数字煤场管控系统火电厂哪家好
发布时间:2026.03.07
陕西数字煤场管控系统火电厂哪家好
发布时间:2026.03.07
煤矿生产数字煤场管控系统的解决方案专注于煤场管理的智能化与信息化,旨在提升企业的运营效率和安全保障。该方案通过构建三维数字煤场,实现对煤种及相关参数的分区管理,实时监测各存煤区域的煤量和温度状态。系统...
-
 河南堆取料机无人值守系统安全防护怎么样
发布时间:2026.03.06
河南堆取料机无人值守系统安全防护怎么样
发布时间:2026.03.06
激光扫描技术在圆形堆取料机无人值守系统中承担着关键的测绘任务。通过在堆料机悬臂的两侧配置高精度激光扫描仪,系统能够以扇形扫描的方式迅速捕获料堆的三维数据。这些扫描数据涵盖了料堆的边界形状、堆积角度及高...
-
陕西堆取料机无人值守系统
发布时间:2026.03.05
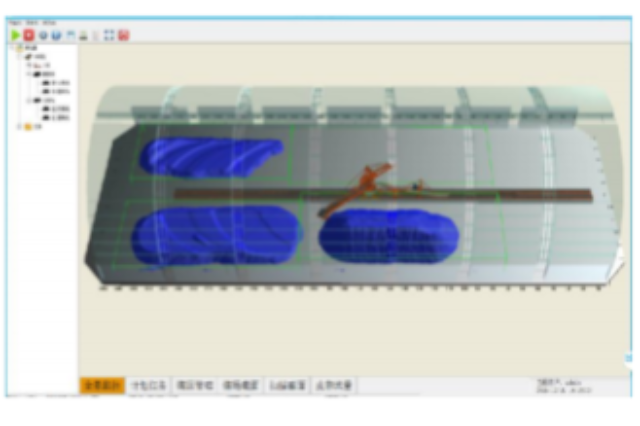
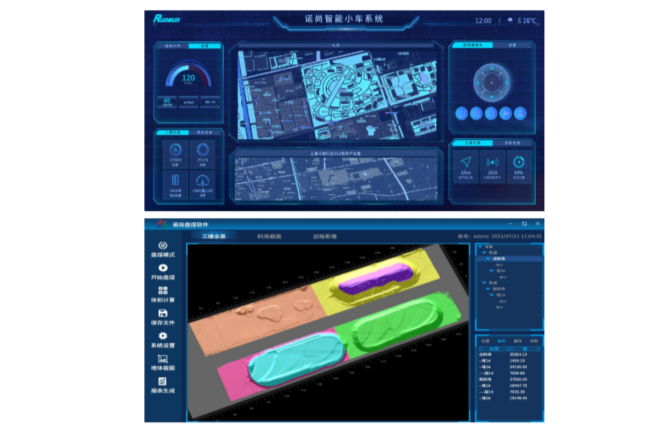
在数字化堆取料机无人值守系统中,仿真处理技术承担了作业控制和优化的关键功能。系统通过激光扫描仪对料堆进行动态扫描,收集大量点云数据,形成包含边界、起止点等关键坐标的三维几何模型。随后,借助自主开发的软...
-
 福建解决方案数字煤场管控系统
发布时间:2026.03.04
福建解决方案数字煤场管控系统
发布时间:2026.03.04
合理配置资源以实现煤场管理的高效运作,是发电集团面临的重要课题。数字煤场管控系统结合信息化与自动化技术,支持煤场的分类存放与精确取煤,同时能够实时监测煤堆温度,辅助进行碾压翻烧作业,并自动完成盘煤任务...
-
上海数字煤场管控系统大型料场数据处理
发布时间:2026.03.03
煤场管理中,数字化管控系统逐渐成为提升管理效率和安全保障的关键工具。系统通过多维数据采集,实现煤堆温度、体积及存放区域的实时监测,辅助制定科学的取煤计划,优化资源配置。管理流程涵盖进煤、耗煤和存煤环节...
-
 云南电气房轨道巡检机器人参数监测
发布时间:2026.03.02
云南电气房轨道巡检机器人参数监测
发布时间:2026.03.02
局部放电检测是电气设备维护中的关键环节,尤其适用于电气房这种设备密集且环境复杂的场所。轨道巡检机器人搭载高灵敏度局部放电传感器,能够持续捕获设备内部微弱放电信号,这些信号通常预示绝缘性能下降或潜在故障...
-
河北数字煤场管控系统堆取料管理开发
发布时间:2026.03.02
企业在考虑动态数字煤场管控系统的采购时,往往会关注系统的整体投入费用。由于不同煤矿和燃煤电厂的运营规模与需求存在差异,系统的价格会根据功能模块、设备配置和定制服务的不同而有所变化。该系统集成了三维煤场...
-
广东堆取料机无人值守系统煤矿生产哪家好
发布时间:2026.03.02
操作安全性是安全急停堆取料机无人值守系统设计中的重要考量,系统操作流程力求简洁明了,便于操作者快速应对紧急情况。通过输料综合楼内的控制台,操作人员能够远程监控设备状态并下达指令。控制台配备操纵杆、按钮...
-
 山西数字煤场管控系统上煤选型
发布时间:2026.03.02
山西数字煤场管控系统上煤选型
发布时间:2026.03.02
操作数字煤场管控系统时,简化流程和界面指引是关键,确保煤矿和发电集团用户能够迅速掌握并高效执行。系统启动后,自动化设备完成煤场三维激光扫描,生成精确的煤堆分区模型,随后根据煤种和参数划定存煤区域。操作...
-
 山东堆取料机无人值守系统一体化应用效果
发布时间:2026.03.01
山东堆取料机无人值守系统一体化应用效果
发布时间:2026.03.01
操作大型料场堆取料机无人值守系统时,远程监控与自动化控制的协调至关重要。操作台设于输料综合楼,配备操纵杆、按钮及选择开关,操作人员借此实现对堆取料机的实时指令下达。作业流程从确认计划开始,系统接收任务...
-
河南数字煤场管控系统大型料场的优点
发布时间:2026.03.01
老旧煤场普遍存在煤种混杂、存储不规范和温度监控不及时等问题,这些因素在燃煤电厂及大型料场中增加了管理难度和安全隐患。针对这些复杂状况,数字煤场管控系统方案通过划分存煤区域,采用三维立体图形技术,动态展...
-
 广东堆取料机无人值守系统自动化实时扫描
发布时间:2026.03.01
广东堆取料机无人值守系统自动化实时扫描
发布时间:2026.03.01
散货堆场中的堆取料机无人值守系统依赖于PLC控制指令的准确传递与执行,这一环节在自动化作业中起着关键作用。PLC负责将上位机下达的作业任务转化为具体动作,确保堆取料机按计划完成堆料与取料过程。系统利用...
-
 河南堆取料机无人值守系统AI视觉检测
发布时间:2026.02.28
河南堆取料机无人值守系统AI视觉检测
发布时间:2026.02.28
安全急停堆取料机无人值守系统的检测功能涵盖多种安全防护模块,旨在有效管理设备运行风险。系统包含激光扫描检测装置、料位监测系统、斗轮机定位识别系统及安全防护组件。激光扫描装置安装于堆料机悬臂和取料机门架...
-
 北京数字煤场管控系统料场有哪些
发布时间:2026.02.28
北京数字煤场管控系统料场有哪些
发布时间:2026.02.28
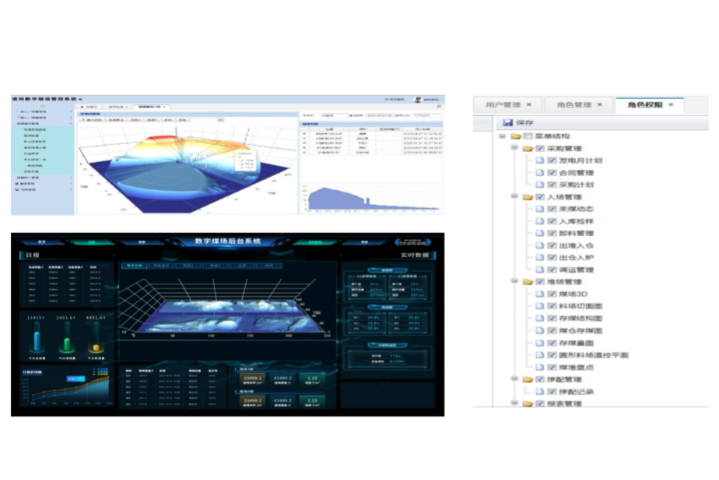
数字煤场管控系统在工矿企业煤场管理中扮演着重要角色,其结构由若干功能模块组成,覆盖进煤、耗煤与存煤三个主要环节。进煤模块专注于卸煤位置、数量及暂估煤质的详细登记,确保煤堆位置和成本核算的透明化。耗煤模...
-
广东堆取料机无人值守系统散货堆场开发
发布时间:2026.02.28
石化行业的料场管理面临多样化的堆料形态和复杂作业需求,如何实现堆取料机的无人值守成为关注焦点。理想的无人值守系统应具备精确的料堆扫描和智能调度能力,同时兼顾安全防护。通过激光扫描技术,系统能够实时捕获...
-
上海堆取料机无人值守系统悬臂防撞应用效果
发布时间:2026.02.27
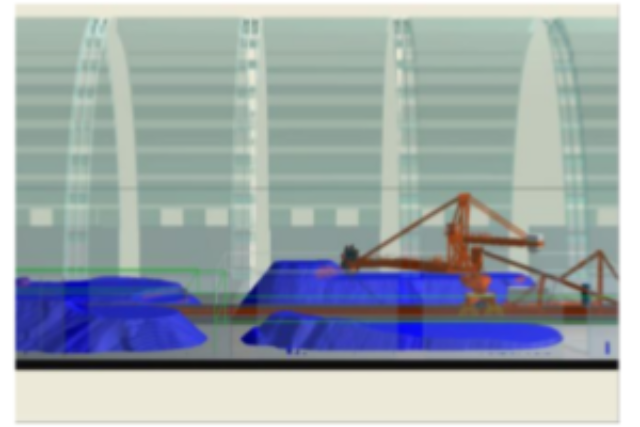
智能堆取料系统的关键在于数据的精确采集与处理,尤其是在石化行业复杂的料场环境中。系统通过激光扫描装置对料堆进行扇形扫描,快速获取边界、堆高及堆宽等关键参数,进而建立高精度的三维数字模型。扫描数据经过归...
-
浙江堆取料机无人值守系统斗轮机通讯技术
发布时间:2026.02.27
石化行业的料场管理面临多样化的堆料形态和复杂作业需求,如何实现堆取料机的无人值守成为关注焦点。理想的无人值守系统应具备精确的料堆扫描和智能调度能力,同时兼顾安全防护。通过激光扫描技术,系统能够实时捕获...
-
山西堆取料机无人值守系统自动化安装流程
发布时间:2026.02.27
安全急停堆取料机无人值守系统的检测功能涵盖多种安全防护模块,旨在有效管理设备运行风险。系统包含激光扫描检测装置、料位监测系统、斗轮机定位识别系统及安全防护组件。激光扫描装置安装于堆料机悬臂和取料机门架...
-
 浙江堆取料机无人值守系统散货堆场仿真处理
发布时间:2026.02.26
浙江堆取料机无人值守系统散货堆场仿真处理
发布时间:2026.02.26
无人值守系统的检测模块集成了激光扫描、料位监测、斗轮机定位及安全防护等多个关键组成部分。激光扫描系统安装于堆料机结构上,负责对料堆进行扇形扫描,实时捕捉其形态变化,减少了数据盲区。料位检测系统则借助雷...
-
 北京数字煤场管控系统火电厂多少钱
发布时间:2026.02.26
北京数字煤场管控系统火电厂多少钱
发布时间:2026.02.26
火电厂的煤场管理工作涉及多个环节,其中煤量的精确掌握和存放状态的实时监控是保障发电稳定运行的重要因素。数字煤场管控系统通过三维立体图形展示煤场各存煤区域的实际情况,支持管理人员合理安排取煤计划,有效减...
-
 温湿度检测的作用智能巡检系统
发布时间:2026.02.26
温湿度检测的作用智能巡检系统
发布时间:2026.02.26
继电室作为电力系统的重要环节,对设备运行安全有较高要求。继电室室内轮式升降巡检机器人由多个功能模块组成,构建了一个集成化的智能巡检平台。主要硬件包括红外热像仪和高清可见光摄像机,用以捕捉设备表面温度和...
-
 云南的优点堆取料机无人值守系统
发布时间:2026.02.25
云南的优点堆取料机无人值守系统
发布时间:2026.02.25
燃煤电厂堆取料机无人值守系统的设定涉及从感知层到控制层的自动化配置,关键在于实现料堆信息的精确采集与堆取作业的智能调度。系统采用激光扫描装置,对料堆进行动态扫描,生成三维图像和料堆信息库,确保堆取作业...
-
 内蒙古盘煤巡检机器人气体
发布时间:2026.02.25
内蒙古盘煤巡检机器人气体
发布时间:2026.02.25
热像测温功能是室内轮式升降巡检机器人中的重要组成部分,专注于对关键设备温度的精确监控。机器人搭载的红外热像仪能够实时记录设备表面温度分布,自动识别异常热点,当温度超过预设阈值时发出警示,便于及时发现潜...
-
 上海工业安全监测系统粉尘扬尘自动寻检
发布时间:2026.02.25
上海工业安全监测系统粉尘扬尘自动寻检
发布时间:2026.02.25
堆取料机作为大型料场的主要设备,其安全性和稳定性直接影响到物料的存储和运输效率。工业安全监测系统在堆取料机上的应用显得尤为重要。通过该系统,企业可以实时监控设备的运行状态,包括机械部件的磨损情况、设备...