产品中心


若贝特并联机器人并非单一功能设备,而是具备多行业适配能力的自动化关键部件,公司依托“自主研发、承接整线”的优势,为不同行业客户提供...
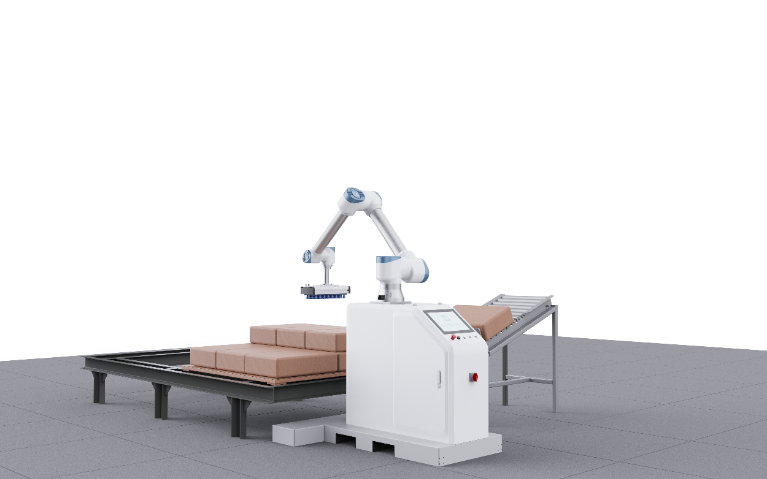
若贝特协作码垛机器人以精 准高效重新定义工业码垛标准,为现代智能制造提供全新解决方案。该设备最大负载40kg,能够应对大多数工...

专为高效码垛而生的若贝特协作机器人,完美融合创新技术与实用性能,为工业自动化领域带来革 命性突破。其负载能力覆盖10-40kg...

创新科技,智造未来——若贝特协作码垛机器人引 领行业变革!这款设备以其卓 越性能树立行业新标 杆。智能负载调节系统支持10-...
若贝特智能机器人科技有限公司推出的协作码垛机器人,凭借卓 越性能成为工业自动化领域的理想选择。该机器人最大负载达40kg,重复...

若贝特智能机器人科技有限公司推出的协作码垛机器人,凭借其卓 越性能成为工业自动化领域的理想选择。该机器人拥有10-40kg的宽...

若贝特 码垛机器人——精 准高效的智能之选!这款创新产品以其卓 越性能重新定义行业标准。智能负载系统支持10-40公斤范...
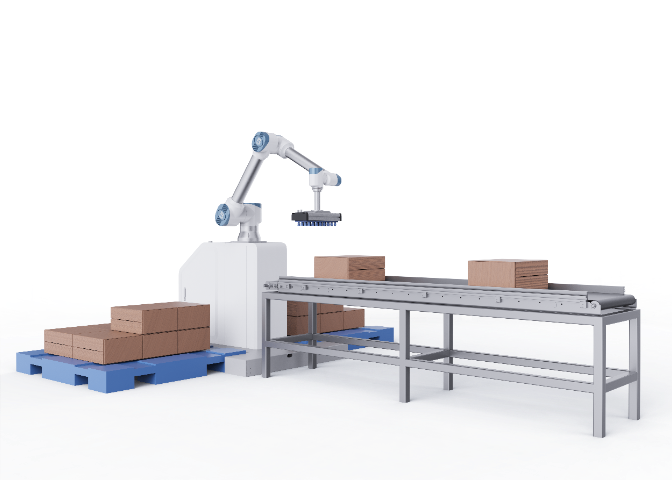
协作码垛机器人是工业领域“技术民主化”浪潮的杰出楷模。它通过“即插即用”、免集成、易操作的特性,极大地降低了使用先进技术的门槛。过...
若贝特 ①团队由来自清华大学及哈工大的教授及硕博组成;团队曾参与国内的航天空间对接模拟并联机器人研发和实验。 ②已申请专利近百项,撰写SCI论文数十篇,并担任多个SCI期刊审稿人。 ③主打产品设备广泛应用于食品、药品、3C电子、日化、五金、新能源等行业的分拣、搬运、包装、装盘、上下料等环节
查看更多