新闻中心 - 成都中科图测科技有限公司
-
 四川多点式位移计批发
四川多点式位移计批发电磁感应式位移计通常由磁铁、线圈、弹簧等部件组成。当物体发生位移时,磁铁会随之移动,从而改变线圈中的磁场强度,产生感应电动势。通过测量感应电动势的大小,就可以计算出物体的位移。电磁感应式位移计的读数方...
发布时间:2025.10.05 -
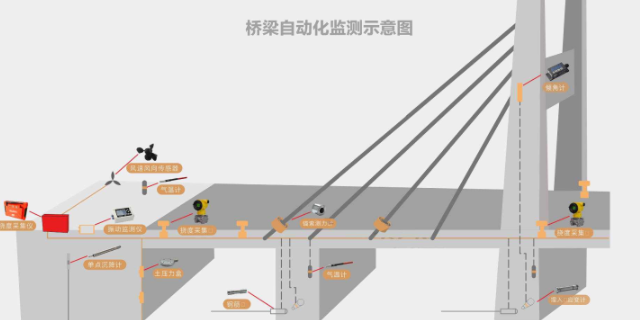 阵列式位移计现货经营
阵列式位移计现货经营Ziki-M图像位移测量系统是一种基于数字图像处理技术的位移测量系统,可以实现对物体在空间中的位移、形变等参数的测量。在隧道工程中,Ziki-M图像位移测量系统可以应用于以下方面:隧道围岩位移监测:Z...
-
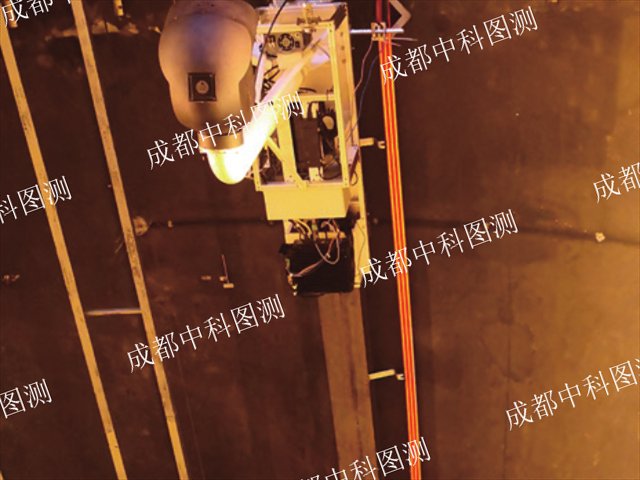
 四川隧道检测机器人批发
四川隧道检测机器人批发恶劣环境适应,稳定可靠的检测:隧道内部环境复杂多变,潮湿、高温、多尘以及强电磁干扰等恶劣条件对检测设备提出了严峻挑战。成都中科图测的隧道裂缝检测机器人经过特殊设计和严格测试,具备的环境适应能力。其机身...
-
 高速公路隧道裂缝检测机器人厂家
高速公路隧道裂缝检测机器人厂家随着人工智能技术的不断发展,隧道巡检机器人也迎来了智能化升级。成都中科图测科技有限公司的隧道巡检机器人搭载了先进的人工智能算法,具备自主决策和智能分析能力。在巡检过程中,机器人能够根据检测到的实时数据...
-
 四川轨道式巡检机器人定做
四川轨道式巡检机器人定做恶劣环境适应,稳定可靠的检测:隧道内部环境复杂多变,潮湿、高温、多尘以及强电磁干扰等恶劣条件对检测设备提出了严峻挑战。成都中科图测的隧道裂缝检测机器人经过特殊设计和严格测试,具备的环境适应能力。其机身...
-
四川宽度测量位移计生产
激光干涉式位移计20世纪60年代,激光技术的发展促进了激光干涉式位移计的出现。激光干涉式位移计是利用激光干涉原理来测量物体的位移,它通过测量激光光束的干涉条纹来计算物体的位移。激光干涉式位移计具有精度...
-
 隧道裂缝检测机器人定做
隧道裂缝检测机器人定做隧道巡检工作需要机器人具备强大的续航能力和快速响应能力。成都中科图测科技有限公司的隧道巡检机器人配备了大容量的锂电池,一次充电可连续工作8小时以上,满足了长时间巡检任务的需求。同时,该机器人支持快速充...
-
 机器视觉测量仪生产厂家
机器视觉测量仪生产厂家电磁感应式位移计通常由磁铁、线圈、弹簧等部件组成。当物体发生位移时,磁铁会随之移动,从而改变线圈中的磁场强度,产生感应电动势。通过测量感应电动势的大小,就可以计算出物体的位移。电磁感应式位移计的读数方...
-
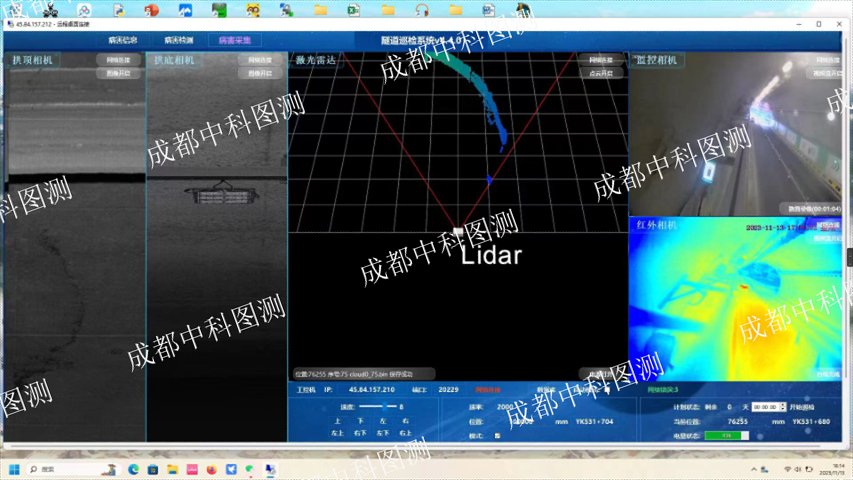
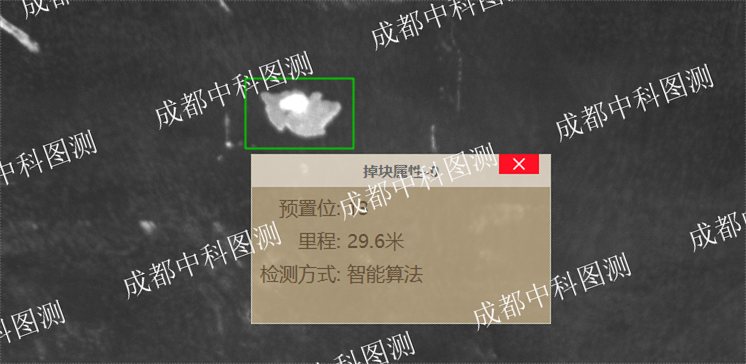
 隧道自动化巡检系统定做
隧道自动化巡检系统定做中科图测的隧道巡检机器人在技术上达到了行业水平。它融合了智能病害识别与精确测量技术,能对隧道衬砌掉块进行智能识别,精细判断衬砌结构的完整性;在渗漏水检测方面,可智能测量面积≥0.04m²的渗漏水区域,...
-
 四川高精度位移计厂家直销
四川高精度位移计厂家直销利用图像位移计测量振动加速度需通过目标点在连续图像中的位移变化来实现。以下是一种可能的操作流程:1.安装目标点:在振动目标物体表面上安装一个反光点或者其他能够在图像中清晰识别的目标点。确保目标点能够在...
-
隧道智能巡检机器人定做
恶劣环境适应,稳定可靠的检测:隧道内部环境复杂多变,潮湿、高温、多尘以及强电磁干扰等恶劣条件对检测设备提出了严峻挑战。成都中科图测的隧道裂缝检测机器人经过特殊设计和严格测试,具备的环境适应能力。其机身...
