新闻中心 - 扬州熙岳智能科技有限公司
-
 山东压装机定制机器视觉检测服务功能
山东压装机定制机器视觉检测服务功能选择定制视觉检测服务,为您的企业注入新的品质活力。当企业面临品质提升瓶颈时,传统检测模式往往难以突破,而定制视觉检测服务能带来技术与管理层面的双重革新。技术上,引入 AI 视觉算法、自动化检测设备等前...
发布时间:2026.03.06 -
 浙江铅酸电池瑕疵检测系统
浙江铅酸电池瑕疵检测系统瑕疵检测系统是现代工业自动化与质量控制体系中的关键组成部分,它是一种利用先进传感技术、图像处理、人工智能算法等手段,自动识别产品或材料表面及内部缺陷的综合性技术系统。其**目标在于替代传统依赖人眼的主...
发布时间:2026.03.05 -
 天津智能定制机器视觉检测服务
天津智能定制机器视觉检测服务我们的定制视觉检测服务,确保每一个细节都尽善尽美。在产品检测中,细微缺陷可能成为影响产品性能或用户体验的 “短板”,我们的服务正是聚焦这些易被忽视的细节。针对电子元件,可定制微米级引脚间距检测方案,识...
发布时间:2026.03.04 -
 北京铅酸电池定制机器视觉检测服务处理方法
北京铅酸电池定制机器视觉检测服务处理方法定制视觉检测服务,让您的产品检测更加细致。在产品生产环节中,细微的缺陷往往难以通过人工检测捕捉,而定制视觉检测服务恰好能填补这一空白。我们会根据您产品的独特属性,如材质纹理、尺寸规格、外观细节等,量身...
发布时间:2026.03.03 -
 江西冲网定制机器视觉检测服务价格低
江西冲网定制机器视觉检测服务价格低专业的定制视觉检测,为您的产品提供品质保障。我们的专业性体现在对行业标准的深刻理解与技术的应用上。团队成员均具备 5 年以上机器视觉行业经验,熟悉各行业品质标准,如医疗器械需符合 FDA 相关要求,汽...
发布时间:2026.03.03 -
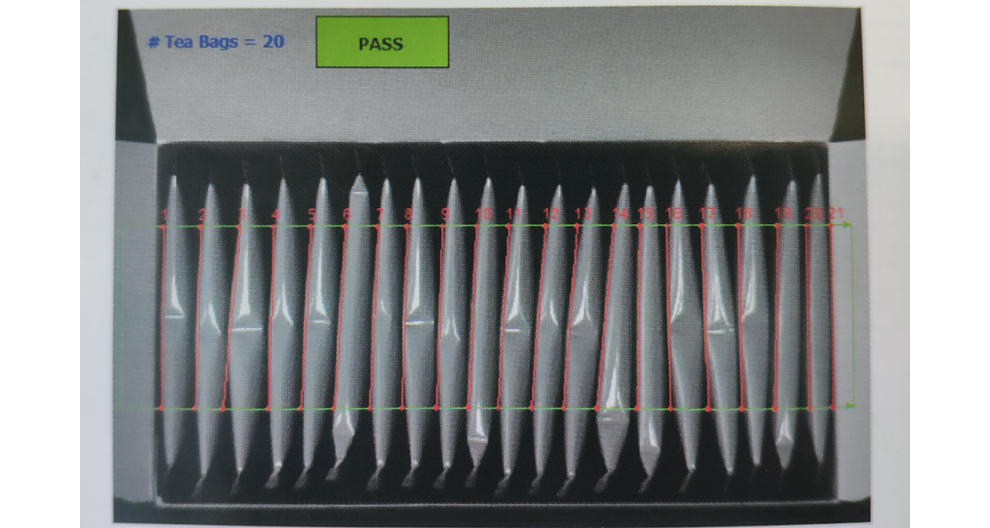
 山东榨菜包定制机器视觉检测服务按需定制
山东榨菜包定制机器视觉检测服务按需定制定制视觉检测,让您的产品检测更加智能化、高效化。传统检测模式多依赖人工操作,不流程繁琐,还存在效率瓶颈。定制视觉检测服务融入了人工智能与自动化技术,系统可自动完成产品定位、图像采集、数据分析与结果判定...
发布时间:2026.03.02