新闻中心 - 扬州熙岳智能科技有限公司
-
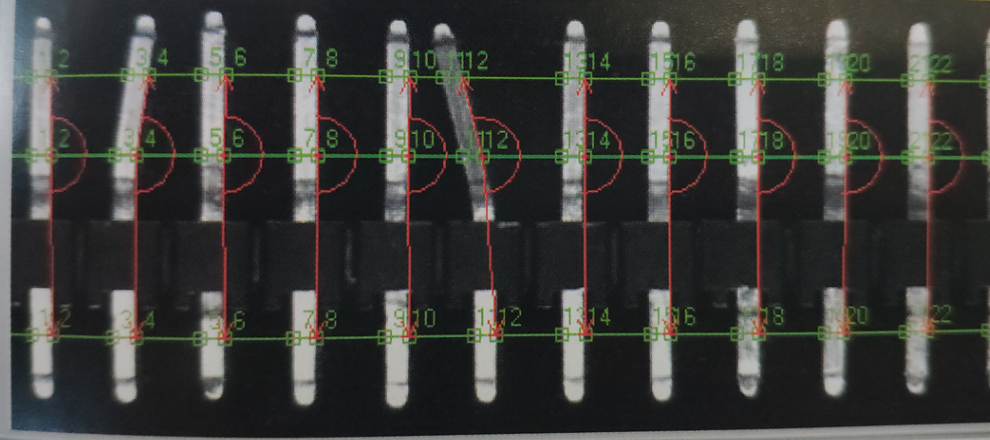
 江西传送带跑偏定制机器视觉检测服务案例
江西传送带跑偏定制机器视觉检测服务案例瑕疵检测系统对于提高产品的可追溯性有着明显的助力。在产品的整个生命周期中,从原材料采购到生产加工,再到成品销售以及售后服务,每一个环节的信息记录都至关重要。瑕疵检测系统在检测产品时,会为每一个产品分配...
发布时间:2025.10.02 -
 江西篦冷机工况定制机器视觉检测服务定制价格
江西篦冷机工况定制机器视觉检测服务定制价格定制视觉检测服务,助力您的企业实现品质升级。当企业处于品质提升的关键阶段,传统检测模式往往难以突破精度与效率瓶颈。定制视觉检测服务会深入分析企业现有品质短板,针对性设计解决方案。例如,若企业因外观缺陷...
发布时间:2025.10.02 -
 北京铅酸电池定制机器视觉检测服务价格低
北京铅酸电池定制机器视觉检测服务价格低瑕疵检测系统借助电磁感应技术实现对产品表面的金属检测。电磁感应原理是该检测方法的重要依据。当检测系统中的电磁感应线圈通电后,会产生交变磁场,当带有金属材质的产品靠近时,金属内部会产生感应电流,进而又会...
发布时间:2025.10.01 -
 天津智能定制机器视觉检测服务按需定制
天津智能定制机器视觉检测服务按需定制制药行业对药品包装的合规性要求极高,定制机器视觉系统可检测泡罩包装的缺粒、破损或错位,并验证标签信息(如药品名称、批号、有效期)的准确性。例如,在高速压片机后端的视觉检测站,系统通过高分辨率相机和AI...
发布时间:2025.10.01 -
 吉林压装机定制机器视觉检测服务解决方案
吉林压装机定制机器视觉检测服务解决方案定制视觉检测服务,让您的产品检测更加智能、可靠。智能化方面,系统融入 AI 深度学习技术,可自主学习不同类型的缺陷特征,随着检测样本增多,缺陷识别准确率不断提升,还能自动分类缺陷类型,生成缺陷分布热力...
发布时间:2025.10.01 -
浙江电池定制机器视觉检测服务趋势
定制视觉检测,让您的产品检测更加贴合实际需求。通用检测设备往往存在 “功能冗余” 或 “需求缺口”,难以适配企业个性化场景。我们会从您的实际生产情况出发:若您是小批量多品类生产,将设计可快速切换参数的...
发布时间:2025.09.30 -
 广东电池定制机器视觉检测服务性能
广东电池定制机器视觉检测服务性能瑕疵检测系统具备出色的兼容性,能够与其他生产设备进行无缝集成,从而有力地推动自动化生产的实现。在现代化的工厂车间里,各种生产设备相互协作,共同完成产品的制造过程。瑕疵检测系统作为质量把控的关键环节,可...
发布时间:2025.09.30 -
 吉林冲网定制机器视觉检测服务用途
吉林冲网定制机器视觉检测服务用途在产品质量的管控过程中,瑕疵检测系统发挥着至关重要的作用,它能够有效减少人为因素对产品质量的不利影响。人工检测往往存在诸多局限性,由于检测人员的视力差异、疲劳程度、注意力集中时间有限以及个人主观判断标...
发布时间:2025.09.29 -
广东定制机器视觉检测服务品牌
我们的定制视觉检测,为您的企业提供个性化的品质支持。每个企业的生产模式、产品特性与品质目标都存在差异,通用检测服务难以满足个性化需求。我们会深入了解您企业的发展战略、市场定位以及当前面临的品质痛点,在...
发布时间:2025.09.29 -
 江苏自动化视觉滴定仪趋势
江苏自动化视觉滴定仪趋势在石油化工领域,油品质量直接关系到生产安全和产品性能,熙岳视觉滴定仪在油品质量检测中发挥着重要作用。石油化工产品种类繁多,对油品的酸值、碱值、水分含量等指标的检测要求极高。熙岳视觉滴定仪凭借其的检测...
发布时间:2025.09.28 -
 江苏国产视觉滴定仪联系电话
江苏国产视觉滴定仪联系电话熙岳视觉滴定仪的数据存储功能强大,可保存大量实验数据。仪器内置了大容量的固态硬盘,能够存储数年的实验数据。这些数据不包括滴定过程中的关键参数,如滴定剂用量、滴定时间、滴定终点等,还包含实验过程中采集...
发布时间:2025.09.28
