-
 广东电池定制机器视觉检测服务服务价格
发布时间:2026.05.02
广东电池定制机器视觉检测服务服务价格
发布时间:2026.05.02
专业的定制视觉检测,为您的企业提供品质优化。我们并非简单交付一套检测设备,而是以 “提升企业品质水平” 为目标,提供全周期的品质优化服务。在服务初期,通过对企业现有生产流程与品质痛点的调研,设计能解决...
-
 天津压装机定制机器视觉检测服务供应商
发布时间:2026.05.02
天津压装机定制机器视觉检测服务供应商
发布时间:2026.05.02
定制视觉检测服务,让您的产品检测更加智能、可靠。智能化方面,系统融入 AI 深度学习技术,可自主学习不同类型的缺陷特征,随着检测样本增多,缺陷识别准确率不断提升,还能自动分类缺陷类型,生成缺陷分布热力...
-
 上海工业视觉检测ccd
发布时间:2026.05.01
上海工业视觉检测ccd
发布时间:2026.05.01
熙岳智能视觉检测技术采用行业的图像采集技术,确保检测过程中还原产品真实细节。设备配备全球的工业相机,部分型号采用背照式 CMOS 传感器,像素高达 2.5 亿,配合 12K 分辨率镜头,能够捕捉产品表...
-
 压装机定制机器视觉检测服务功能
发布时间:2026.05.01
压装机定制机器视觉检测服务功能
发布时间:2026.05.01
定制视觉检测服务,让您的产品检测更加高效、智能。高效体现在检测速度与生产节奏的匹配 —— 我们会根据您的生产线节拍,优化系统的图像采集与数据分析速度,确保检测环节不成为生产瓶颈,甚至能提升整体生产效率...
-
 江苏自动化智能采摘机器人功能
发布时间:2026.05.01
江苏自动化智能采摘机器人功能
发布时间:2026.05.01
智能采摘机器人作为智慧农业的重要装备之一,是整合机器视觉、传感器、运动控制及AI技术的综合性自动化设备,其使命是替代人工完成农业采摘环节中高精度、高风险的作业,推动农业生产从传统人工模式向智能化、规模...
-
上海铅酸电池定制机器视觉检测服务
发布时间:2026.04.30
定制机器视觉检测服务具备极强的行业适配性,能够满足不同行业的个性化检测需求,成为各行业质量控制的支撑。在汽车制造行业,定制检测系统可用于车身焊接缺陷检测、零部件尺寸测量、漆面划痕检测等,能够精细识别焊...
-
 江苏电池片阵列排布定制机器视觉检测服务服务价格
发布时间:2026.04.30
江苏电池片阵列排布定制机器视觉检测服务服务价格
发布时间:2026.04.30
定制视觉检测服务,让您的产品检测更加专业。我们的团队汇聚了机器视觉算法工程师、行业应用等专业人才,具备十余年跨行业检测经验。在方案设计阶段,会结合您所在行业的法规标准(如医疗器械行业的 GMP 标准、...
-
 北京铅酸电池定制机器视觉检测服务价格
发布时间:2026.04.29
北京铅酸电池定制机器视觉检测服务价格
发布时间:2026.04.29
选择定制视觉检测服务,为您的企业注入新的品质活力。当企业面临品质提升瓶颈时,传统检测模式往往难以突破,而定制视觉检测服务能带来技术与管理层面的双重革新。技术上,引入 AI 视觉算法、自动化检测设备等前...
-
 福建铅酸电池定制机器视觉检测服务制造价格
发布时间:2026.04.29
福建铅酸电池定制机器视觉检测服务制造价格
发布时间:2026.04.29
定制机器视觉检测服务能够适配恶劣工业环境,解决人工检测无法应对的检测场景,拓展检测边界。在工业生产中,部分检测场景存在高温、低温、粉尘、强光、有毒等恶劣环境,人工检测无法长期适应,不仅检测效率低,还会...
-
 天津密封盖定制机器视觉检测服务趋势
发布时间:2026.04.28
天津密封盖定制机器视觉检测服务趋势
发布时间:2026.04.28
专业的定制视觉检测,为您的产品提供品质保障。我们的专业性体现在对行业标准的深刻理解与技术的应用上。团队成员均具备 5 年以上机器视觉行业经验,熟悉各行业品质标准,如医疗器械需符合 FDA 相关要求,汽...
-
福建铅酸电池定制机器视觉检测服务售价
发布时间:2026.04.28
我们的定制视觉检测,为您的企业提供品质监控和优化。品质监控并非停留在 “识别缺陷”,更在于 “预防缺陷”。我们的定制系统会实时采集生产各环节的检测数据,通过数据分析模型识别品质波动趋势 —— 当某一参...
-
 福建铅板定制机器视觉检测服务技术参数
发布时间:2026.04.28
福建铅板定制机器视觉检测服务技术参数
发布时间:2026.04.28
硬件选型是定制机器视觉检测服务的重要环节,直接决定了检测系统的精度、速度和稳定性,需结合企业需求进行精细匹配,避免冗余配置或配置不足。服务团队会根据需求分析报告,针对性选择工业相机、镜头、光源、图像采...
-
 上海铅酸电池瑕疵检测系统案例
发布时间:2026.04.27
上海铅酸电池瑕疵检测系统案例
发布时间:2026.04.27
瑕疵检测系统是现代工业 4.0 体系中构建智能质检闭环的基础设施,其技术架构经历了从传统规则化算法到深度学习 AI 模型的跨越式演进。早期的检测系统多依赖人工设定的阈值与边缘特征提取,面对复杂纹理背景...
-
 广东篦冷机工况定制机器视觉检测服务趋势
发布时间:2026.04.27
广东篦冷机工况定制机器视觉检测服务趋势
发布时间:2026.04.27
无论您的产品处于哪个生产阶段,我们都能提供定制化的视觉检测。产品生产涵盖原材料入库、半成品加工、成品出厂等多个阶段,每个阶段的检测重点各不相同。原材料阶段,我们可定制材质识别与杂质检测方案,杜绝不合格...
-
 盐城传送带跑偏瑕疵检测系统按需定制
发布时间:2026.04.27
盐城传送带跑偏瑕疵检测系统按需定制
发布时间:2026.04.27
在医疗器械生产中,瑕疵检测系统的应用严格保障医疗器械的精度与安全性,适用于手术器械、植入式医疗器械、医疗仪器零部件等各类医疗器械。医疗器械对精度、洁净度要求极高,其表面的划痕、锈蚀、变形、异物混入、尺...
-
 福建自动智能采摘机器人售价
发布时间:2026.04.27
福建自动智能采摘机器人售价
发布时间:2026.04.27
采摘机器人与物联网技术的融合,构建了“感知—决策—作业—管理”一体化的智慧采摘体系,进一步提升了农业采摘的精细化、智能化水平,推动智慧农业的深度发展。物联网技术可实现采摘机器人与温室大棚、果园管理系统...
-
 河南一种智能采摘机器人
发布时间:2026.04.27
河南一种智能采摘机器人
发布时间:2026.04.27
采摘机器人的作业效率与稳定性,直接决定了其在农业生产中的应用价值,目前主流采摘机器人的作业效率已远超人工,且具备较强的环境适应性和作业稳定性。在效率方面,不同类型的采摘机器人作业效率存在差异,苹果采摘...
-
 江苏电池瑕疵检测系统制造价格
发布时间:2026.04.27
江苏电池瑕疵检测系统制造价格
发布时间:2026.04.27
企业在进行瑕疵检测系统选型时,应建立一套科学的评估体系,避免盲目追求技术而忽视实际应用需求。重要技术指标是评估的基础,包括检测精度(微米级别)、检测速度(帧率)、误检率 / 漏检率、环境适应性等,必须...
-
 江西猕猴挑智能采摘机器人功能
发布时间:2026.04.27
江西猕猴挑智能采摘机器人功能
发布时间:2026.04.27
未来苹果智能采摘机器人将针对我国多样化的苹果种植模式,完成定制化技术优化,打破 “场景适配难” 的行业壁垒。我国苹果种植主要分为矮化密植、乔化栽培、棚架栽培三大模式,不同模式对机器人的作业空间、机械臂...
-
 苏州瑕疵检测系统产品介绍
发布时间:2026.04.26
苏州瑕疵检测系统产品介绍
发布时间:2026.04.26
在玩具生产中,瑕疵检测系统的应用保障了玩具的安全性与外观品质,适用于塑料玩具、毛绒玩具、电子玩具等各类玩具产品。玩具的表面划痕、破损、毛刺、色差、零件漏装、尖锐边角等瑕疵,会影响玩具的外观与安全性,尤...
-
 福建ccd视觉检测设备
发布时间:2026.04.26
福建ccd视觉检测设备
发布时间:2026.04.26
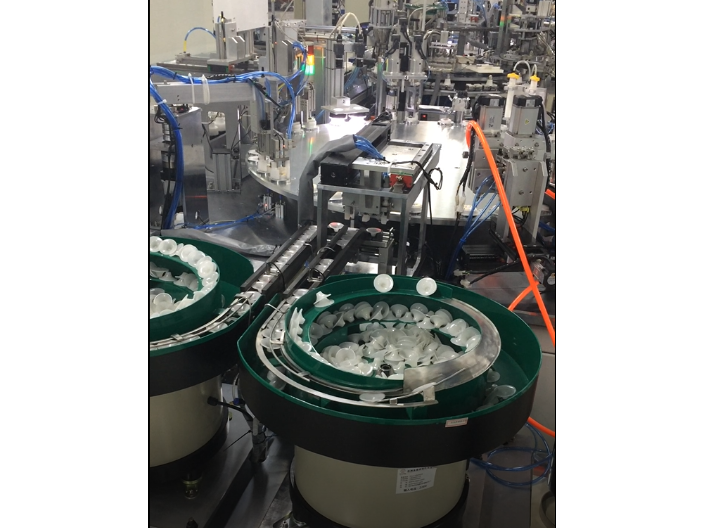
卫浴产品的外观与功能质量直接影响用户的使用体验,熙岳智能为卫浴行业定制的视觉检测方案有效提升产品出厂合格率。在陶瓷马桶检测中,方案采用三维激光扫描与超声探伤结合的技术,检测马桶的釉面平整度、内部空洞缺...
-
 江苏铅酸电池瑕疵检测系统案例
发布时间:2026.04.26
江苏铅酸电池瑕疵检测系统案例
发布时间:2026.04.26
在电子制造业,瑕疵检测系统是保障产品良率与可靠性的一道防线。随着电子产品向微型化、高密度发展,PCB 板、芯片、显示屏等部件的微小瑕疵,如露铜、微裂纹、亮点暗点等,都可能导致产品功能失效。系统采用微米...
-
 天津果实智能采摘机器人价格低
发布时间:2026.04.26
天津果实智能采摘机器人价格低
发布时间:2026.04.26
苹果采摘机器人是智慧农业解决果园用工难题的装备,针对我国苹果主产区丘陵地形复杂、人工采摘效率低、成本占比高的痛点,已形成从单臂到多臂协同的技术谱系。其**架构由多模态视觉感知、多自由度机械臂、仿生末端...
-
 北京草莓智能采摘机器人售价
发布时间:2026.04.26
北京草莓智能采摘机器人售价
发布时间:2026.04.26
柑橘采摘机器人针对柑橘果实表皮脆弱、果柄较粗、多生长在果树枝条间的特点,采用多机械臂协同作业模式,兼顾采摘效率与果实完好率,广泛应用于柑橘主产区的规模化种植基地。柑橘采摘机器人的视觉识别系统采用红外成...
-
 浙江自制智能采摘机器人按需定制
发布时间:2026.04.26
浙江自制智能采摘机器人按需定制
发布时间:2026.04.26
采摘机器人的视觉识别系统主要由高清相机、镜头、图像采集卡、图像处理模块四部分组成,能够完成果实的识别、定位、成熟度判断等任务,相当于机器人的“眼睛”。高清相机负责采集作业环境和果实的图像信息,镜头可根...
-
 山东智能采摘机器人处理方法
发布时间:2026.04.26
山东智能采摘机器人处理方法
发布时间:2026.04.26
草莓采摘机器人是专为浆果类作物设计的采摘设备,针对草莓果实柔软、易破损、生长密集、易被叶片遮挡的特点,采用轻量化、高精度的设计理念,实现草莓的精细、无损采摘。草莓多种植在温室大棚内,作业空间有限,因此...
-
江西铅酸电池定制机器视觉检测服务供应商
发布时间:2026.04.25
选择定制视觉检测服务,为您的产品打造完美的品质体验。完美的品质体验不体现在产品无缺陷,更在于细节处的精益求精。定制视觉检测服务会聚焦产品影响用户体验的关键细节,如家电产品的外壳接缝平整度、电子产品的按...
-
 上海果实智能采摘机器人解决方案
发布时间:2026.04.25
上海果实智能采摘机器人解决方案
发布时间:2026.04.25
采摘机器人的操作人员培训,是确保机器人高效、安全作业的重要环节,随着采摘机器人的普及,对操作人员的专业技能要求也不断提高。操作人员不仅需要掌握机器人的基本操作方法,还需要了解机器人的结构、工作原理、维...
-
江苏多功能智能采摘机器人服务价格
发布时间:2026.04.25
柑橘采摘机器人针对柑橘果实表皮脆弱、果柄较粗、多生长在果树枝条间的特点,采用多机械臂协同作业模式,兼顾采摘效率与果实完好率,广泛应用于柑橘主产区的规模化种植基地。柑橘采摘机器人的视觉识别系统采用红外成...
-
 河南草莓智能采摘机器人案例
发布时间:2026.04.25
河南草莓智能采摘机器人案例
发布时间:2026.04.25
未来,苹果智能采摘机器人的技术迭代将聚焦于 “精细识别 + 高效作业 + 低损采摘” 三大**,依托 AI 算法升级实现全场景适配能力的突破。针对苹果种植中 “果叶遮挡、果柄角度不一、成熟度差异” 等...