-
 江西定制机器视觉检测服务用途
发布时间:2026.01.28
江西定制机器视觉检测服务用途
发布时间:2026.01.28
选择定制视觉检测服务,为您的产品打造完美的品质体验。完美的品质体验不体现在产品无缺陷,更在于细节处的精益求精。定制视觉检测服务会聚焦产品影响用户体验的关键细节,如家电产品的外壳接缝平整度、电子产品的按...
-
 安徽果实智能采摘机器人优势
发布时间:2026.01.28
安徽果实智能采摘机器人优势
发布时间:2026.01.28
采摘机器人的发展,正在深刻重塑农业的生产模式、劳动力结构和乡村经济形态。从积极层面看,它是对全球范围内农业劳动力老龄化、短缺问题的有力回应。在日本、欧洲等发达地区,农业从业者平均年龄已超过60岁,繁重...
-
 辽宁桃子智能采摘机器人解决方案
发布时间:2026.01.27
辽宁桃子智能采摘机器人解决方案
发布时间:2026.01.27
采摘机器人的普及也伴随深层思考。农业机器人伦理委员会正在讨论:当机器人传感器能检测到鸟巢时,是否应修改采收路径?算法优化是否会导致作物基因趋同,削弱生物多样性?发展中国家农民面临的技术鸿沟如何弥合?未...
-
 广东水果智能采摘机器人产品介绍
发布时间:2026.01.27
广东水果智能采摘机器人产品介绍
发布时间:2026.01.27
番茄采摘机器人的研发与应用呈现明显的全球性图景。在荷兰、日本、美国、以色列等设施农业高度发达的国家,相关技术已进入商业化应用阶段,在大型玻璃温室中扮演关键角色。这些国家的技术路线往往与本国农业特点结合...
-
 浙江铅酸电池定制机器视觉检测服务处理方法
发布时间:2026.01.27
浙江铅酸电池定制机器视觉检测服务处理方法
发布时间:2026.01.27
我们的定制视觉检测服务,以客户需求为中心,提供个性化解决方案。从需求调研到方案落地,客户需求始终是我们的导向。需求调研阶段,采用 “一对一” 访谈模式,不了解客户明确提出的检测要求,还会挖掘潜在需求,...
-
 木材定制机器视觉检测服务定制
发布时间:2026.01.26
木材定制机器视觉检测服务定制
发布时间:2026.01.26
我们的定制视觉检测,为您的企业提供品质保障和竞争力。在品质保障层面,系统通过全流程、高精度检测,拦截不合格产品,避免劣质品流入市场,维护企业品牌声誉;同时,定期的设备运维与算法升级服务,确保检测系统长...
-
 山东智能定制机器视觉检测服务制造价格
发布时间:2026.01.26
山东智能定制机器视觉检测服务制造价格
发布时间:2026.01.26
定制视觉检测服务,让您的产品检测更加智能、可靠。智能化方面,系统融入 AI 深度学习技术,可自主学习不同类型的缺陷特征,随着检测样本增多,缺陷识别准确率不断提升,还能自动分类缺陷类型,生成缺陷分布热力...
-
 上海瑕疵检测系统定制价格
发布时间:2026.01.25
上海瑕疵检测系统定制价格
发布时间:2026.01.25
现代瑕疵检测系统每天产生海量的图像数据与检测结果数据。这些数据若*用于实时分拣,则其潜在价值被极大浪费。通过构建数据管道,将这些数据上传至边缘服务器或云端,进行更深入的分析,可以挖掘出巨大价值。例如:...
-
 天津压装机定制机器视觉检测服务技术参数
发布时间:2026.01.25
天津压装机定制机器视觉检测服务技术参数
发布时间:2026.01.25
无论您的产品处于哪个生产阶段,我们都能提供定制化的视觉检测。产品生产涵盖原材料入库、半成品加工、成品出厂等多个阶段,每个阶段的检测重点各不相同。原材料阶段,我们可定制材质识别与杂质检测方案,杜绝不合格...
-
 福建电池定制机器视觉检测服务
发布时间:2026.01.25
福建电池定制机器视觉检测服务
发布时间:2026.01.25
定制视觉检测服务,让您的产品检测更加高效、便捷。传统人工检测不耗时久,还需要工作人员具备专业技能,且检测流程复杂。定制视觉检测服务通过自动化技术简化检测流程,工作人员只需进行简单的设备启动与状态监控操...
-
 江西电池定制机器视觉检测服务私人定做
发布时间:2026.01.24
江西电池定制机器视觉检测服务私人定做
发布时间:2026.01.24
尽管定制机器视觉服务的初期投入高于现成产品,但其长期ROI(投资回报率)明显。以汽车零部件检测为例,定制系统可减少60%的漏检率,每年避免数百万美元的召回损失。成本优化体现在多个维度:硬件上,通过精细...
-
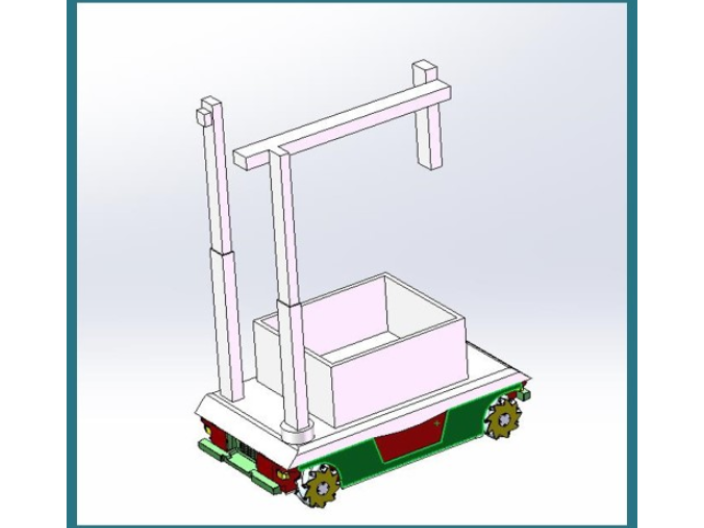
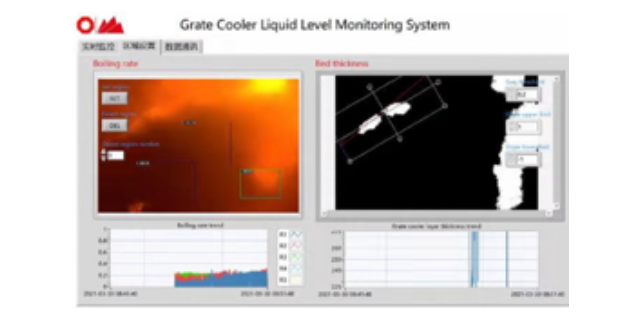
吉林篦冷机工况定制机器视觉检测服务售价
发布时间:2026.01.24
除了条码识别,3D视觉技术在物流行业的应用也日益***。通过结构光或ToF(飞行时间)相机,系统可精确测量包裹的长、宽、高,并计算其体积重量,从而优化装箱策略和运费计算。例如,某国际快递公司采用3D视...
-
北京电池定制机器视觉检测服务按需定制
发布时间:2026.01.24
选择定制视觉检测服务,为您的企业注入新的品质活力。当企业面临品质提升瓶颈时,传统检测模式往往难以突破,而定制视觉检测服务能带来技术与管理层面的双重革新。技术上,引入 AI 视觉算法、自动化检测设备等前...
-
 四川线扫激光瑕疵检测系统定制
发布时间:2026.01.24
四川线扫激光瑕疵检测系统定制
发布时间:2026.01.24
许多工业瑕疵*凭可见光成像难以发现,或者需要获取物体内部或材料成分的信息。因此,融合多种传感模态的检测系统应运而生。例如,X射线成像能够穿透物体,清晰显示内部结构缺陷,如铸件的气孔、缩松,电子元件的焊...
-
 河南智能定制机器视觉检测服务按需定制
发布时间:2026.01.23
河南智能定制机器视觉检测服务按需定制
发布时间:2026.01.23
专业的定制视觉检测服务,为您的企业提供持续的品质提升。我们并非一次付检测设备,而是建立长期服务机制,助力企业品质持续优化。服务初期,帮助企业建立基础检测体系,提升产品合格率;合作过程中,定期分析检测数...
-
 菠萝智能采摘机器人售价
发布时间:2026.01.23
菠萝智能采摘机器人售价
发布时间:2026.01.23
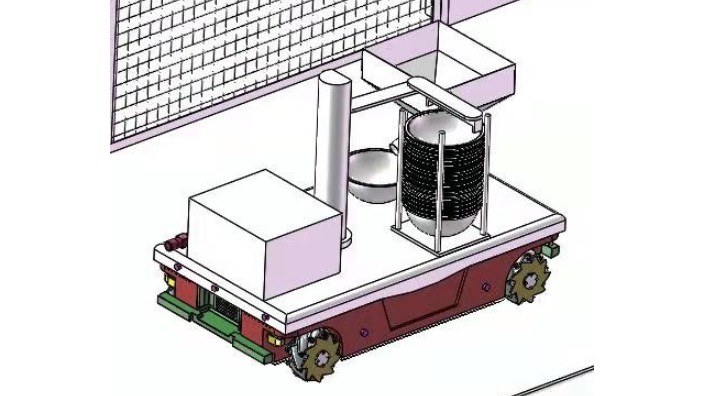
柑橘采摘是劳动密集型产业的典型**。柑橘采摘机器人通常采用“摇撼-收集”或“选择性采摘”两种模式。前者通过振动树干使果实脱落,下方有伞状收集装置承接;后者则更为精密,使用3D视觉定位每个果实,计算比较...
-
 吉林线扫激光定制机器视觉检测服务服务价格
发布时间:2026.01.23
吉林线扫激光定制机器视觉检测服务服务价格
发布时间:2026.01.23
定制机器视觉服务的技术栈涵盖传统图像处理(如OpenCV)和现代AI技术(如卷积神经网络)。开发流程通常始于需求分析,例如明确检测精度(如±0.01mm)、速度(如每分钟处理2000张图像)及环境限制...
-
北京智能定制机器视觉检测服务优势
发布时间:2026.01.23
定制视觉检测,让您的产品检测更加灵活、多样。面对多品类、小批量的生产需求,传统检测设备需频繁更换模具或重新调试,耗时费力。定制视觉检测服务具备高度柔性,通过软件参数快速切换即可适配不同产品检测。例如,...
-
 淮安传送带跑偏瑕疵检测系统供应商
发布时间:2026.01.23
淮安传送带跑偏瑕疵检测系统供应商
发布时间:2026.01.23
早期的瑕疵检测系统严重依赖传统的机器视觉技术。这类方法通常基于预设的规则和数学模型。例如,通过像素值的阈值分割来区分背景与前景,利用边缘检测算子(如Sobel、Canny)来定位轮廓异常,或通过傅里叶...
-
 广东铅酸电池瑕疵检测系统服务价格
发布时间:2026.01.23
广东铅酸电池瑕疵检测系统服务价格
发布时间:2026.01.23
纺织物(梭织、针织)和无纺布在生产过程中极易产生各种瑕疵,如断经、断纬、稀弄、密路、污渍、油纱、破洞、纬斜等。传统依赖验布工的检测方式效率低(速度通常不超过30米/分钟)、劳动强度大、漏检率高。自动验...
-
 吉林木材定制机器视觉检测服务私人定做
发布时间:2026.01.23
吉林木材定制机器视觉检测服务私人定做
发布时间:2026.01.23
无论您的产品有多复杂,我们都能提供定制化的视觉检测方案。不同行业的产品有着截然不同的结构与检测需求,有些产品可能包含多层嵌套组件,有些则具备异形外观或特殊功能区域,传统通用检测方案往往难以适配。而我们...
-
 江西视觉检测视频
发布时间:2026.01.22
江西视觉检测视频
发布时间:2026.01.22
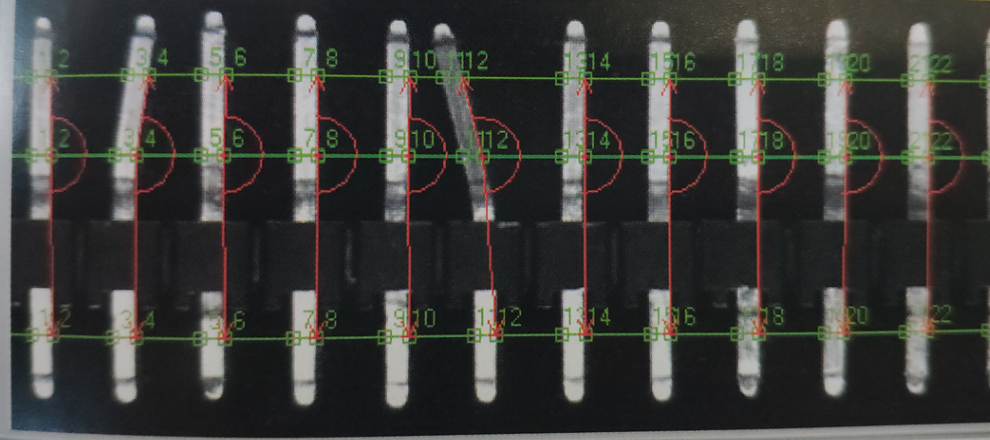
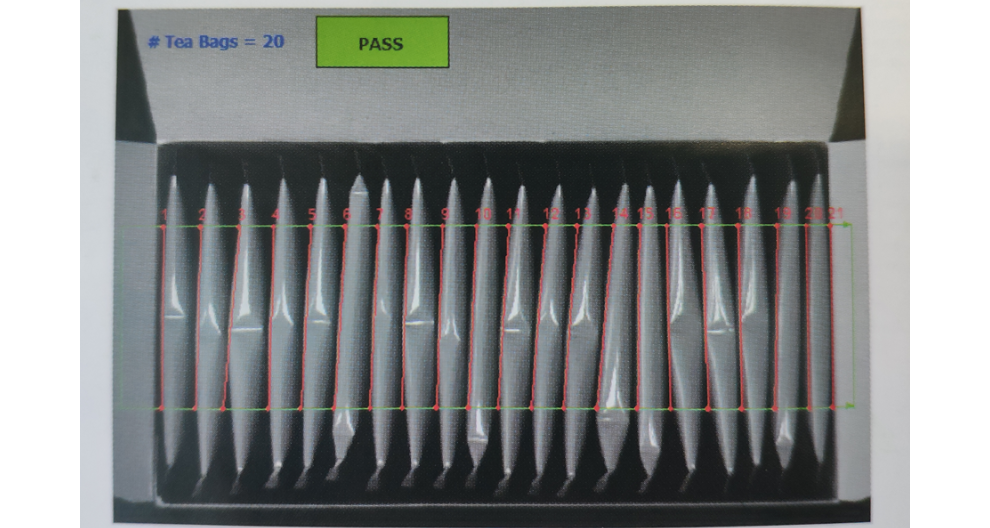
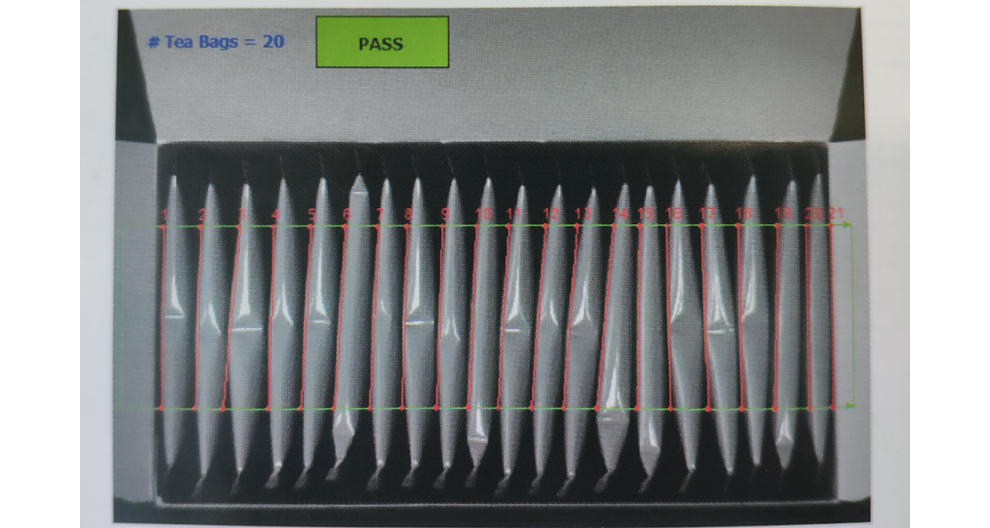
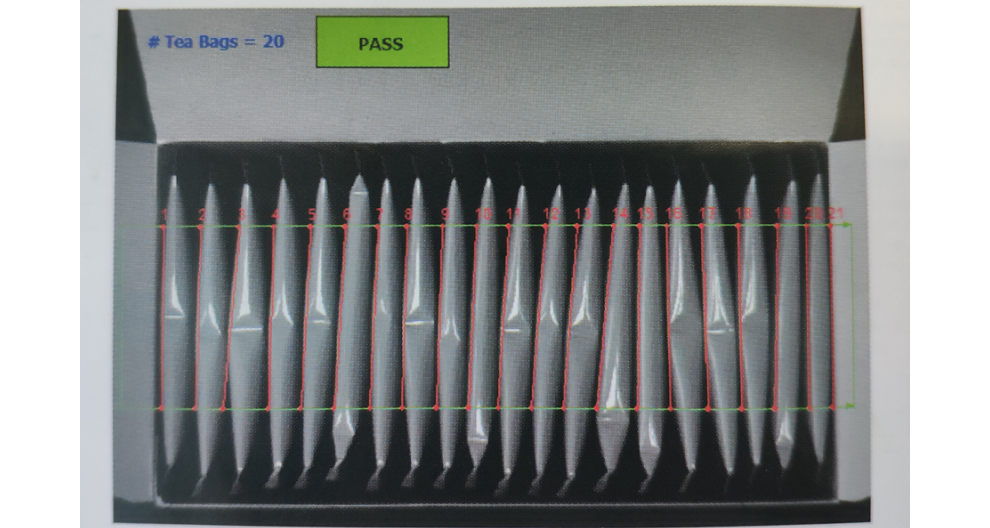
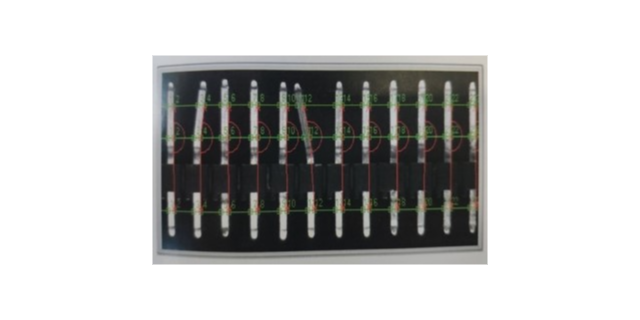
在新能源电池生产领域,极片作为电池的组成部分,其尺寸精度对电池的性能和安全性有着至关重要的影响。国际上对新能源电池极片的尺寸精度有着严格的标准要求。熙岳智能针对新能源电池生产的特点和需求,研发制造了专...
-
 广东三维视觉检测
发布时间:2026.01.22
广东三维视觉检测
发布时间:2026.01.22
体育用品的表面质量不影响美观,更关系到运动员的使用安全与竞技表现,熙岳智能的视觉检测方案为体育用品品质把控提供专业支持。针对运动鞋、羽毛球拍、健身器材等不同品类,方案采用定制化检测策略。在运动鞋检测中...
-
 广东智能瑕疵检测系统服务价格
发布时间:2026.01.22
广东智能瑕疵检测系统服务价格
发布时间:2026.01.22
瑕疵检测技术的未来发展将呈现几个鲜明趋势:1)自适应与自学习系统:系统将不再是执行预设规则的静态工具,而是能够根据产品型号自动切换参数、根据环境变化(如光照衰减)自我校准、并能从少量新样本中快速学习新...
-
福建篦冷机工况定制机器视觉检测服务售价
发布时间:2026.01.22
我们的定制视觉检测服务,以客户需求为中心,提供个性化解决方案。从需求调研到方案落地,客户需求始终是我们的导向。需求调研阶段,采用 “一对一” 访谈模式,不了解客户明确提出的检测要求,还会挖掘潜在需求,...
-
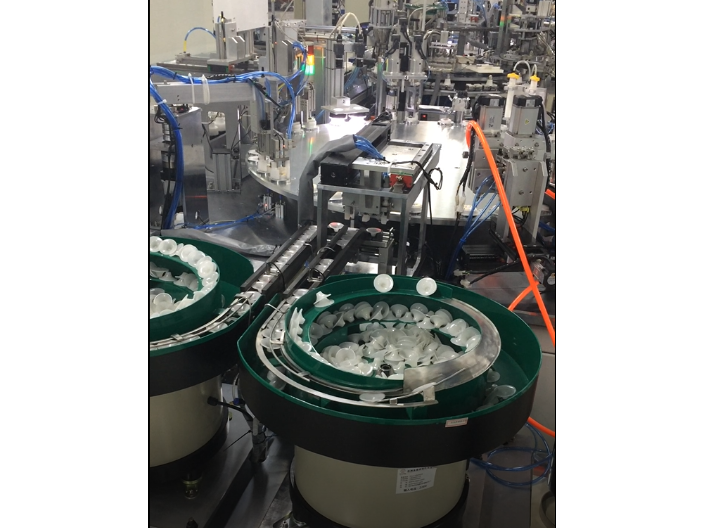
 无锡密封盖瑕疵检测系统用途
发布时间:2026.01.22
无锡密封盖瑕疵检测系统用途
发布时间:2026.01.22
对于在线检测系统而言,“实时性”是关键生命线。它意味着从图像采集到输出控制信号之间的延迟必须严格小于产品在两个工位间移动的时间窗口,否则检测将失去意义。提升处理速度是一项技术挑战。硬件上,采用高性能工...
-
 盐城篦冷机工况瑕疵检测系统
发布时间:2026.01.22
盐城篦冷机工况瑕疵检测系统
发布时间:2026.01.22
纺织品行业的瑕疵检测极具代表性,因其材料柔软、易变形、图案多样,且瑕疵类型复杂(如断经、纬斜、污渍、色差、破洞等)。传统主要依赖熟练工人在灯箱下目视检查,效率低且一致性差。现代自动光学检测系统通过高分...
-
嘉兴密封盖瑕疵检测系统定制
发布时间:2026.01.22
半导体产业是瑕疵检测技术发展的比较大驱动力之一,其检测需求达到了纳米级精度。从硅片(Wafer)制造开始,就需要检测表面颗粒、划痕、晶体缺陷(COP)、光刻胶残留等。光刻工艺后,需要对掩模版(Reti...
-
 山东铅板定制机器视觉检测服务定制价格
发布时间:2026.01.22
山东铅板定制机器视觉检测服务定制价格
发布时间:2026.01.22
电子行业对PCB(印刷电路板)的质量要求极高,焊点虚焊、元件错位或锡膏过量均可能导致电路失效。定制机器视觉系统采用多光谱成像技术,结合AI算法分析焊点的3D形貌(如X射线或激光三角测量),确保BGA(...
-
四川篦冷机工况瑕疵检测系统案例
发布时间:2026.01.21
纺织物(梭织、针织)和无纺布在生产过程中极易产生各种瑕疵,如断经、断纬、稀弄、密路、污渍、油纱、破洞、纬斜等。传统依赖验布工的检测方式效率低(速度通常不超过30米/分钟)、劳动强度大、漏检率高。自动验...