商机详情 -
四川机械手设计
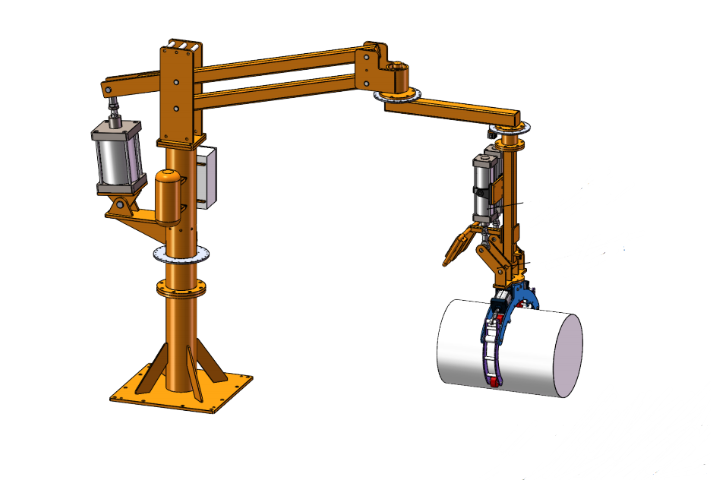
气动助力机械手是一种通过气压平衡实现重物搬运的设备,通过气缸与机械臂组合,使操作人员能轻松抓取、移动重型物料。设备采用浮动平衡技术,物料重量被气压系统部分抵消,减少人工发力。在机械制造车间,气动助力机械手可抓取200公斤的减速机壳体进行装配作业,通过旋转关节实现多角度调整。其配备的制动装置能在断电或断气时自动锁定负载,避免物料坠落。设备表面进行防锈处理,适应油污较多的环境,清洁时只需用抹布擦拭即可。此外,气动助力机械手支持快速换型,通过更换夹具适配不同形状的物料,提升设备通用性。其模块化设计允许根据负载重量调整气缸规格,优化设备性能。六轴机械手在航空制造中,完成复合材料部件的钻孔作业。四川机械手设计
在制药、生物工程及食品加工等洁净生产环境中,机械手的设计必须严格遵循无菌、无尘、易清洁的原则。其外壳通常采用316L不锈钢或阳极氧化铝合金等耐腐蚀、不产尘的材料,表面经过镜面抛光处理,确保无死角、无缝隙,防止微生物滋生或颗粒物积聚。驱动系统需全封闭密封,避免润滑油或压缩气体外泄污染环境;若采用气动驱动,必须配备0.01微米级高效过滤器,确保排出气体符合ISO 14644洁净室标准。电气线路全部内嵌于密封线槽中,接口采用IP67以上防护等级。此外,运动部件使用食品级或医药级低挥发润滑脂,并支持快速拆卸清洗。部分机型还集成在线粒子监测模块,实时反馈设备对环境洁净度的影响,确保全程合规。四川机械手设计搬运机械手采用模块化设计,适配不同尺寸的纸箱搬运需求。
六轴机械手是电子制造领域的精密设备,通过六自由度关节结构与微型夹具组合,实现芯片、电阻等元件的精确抓取与放置。设备采用高精度传感器,能识别0.05毫米级的元件位置偏差,自动修正抓取角度。在半导体封装车间,六轴机械手可抓取晶圆进行贴片作业,通过视觉定位系统确保元件放置精度。其配备的防静电装置能有效释放操作过程中产生的电荷,避免元件损坏。设备表面进行防尘处理,适应无尘车间环境,清洁时只需用吸尘器清理即可。此外,六轴机械手支持多任务并行处理,如同时进行元件分拣与贴装,提升生产效率。其模块化设计允许根据元件尺寸更换夹具,提升设备通用性。
伺服机械手是一种采用伺服电机驱动的自动化设备,通过闭环控制实现高精度动作。在光学元件加工车间,伺服机械手可抓取直径5毫米的镜片,进行镀膜与检测作业。设备采用低摩擦导轨与高刚性臂架,确保运动过程中的微小振动抑制。其配备的力传感器实时监测抓取力度,避免脆性物料破损。伺服机械手表面进行防静电处理,避免元件吸附灰尘,维护时只需定期校准传感器即可保持性能。此外,设备支持与加工机床联动,通过I/O信号自动交换动作指令,实现无人化生产。其动态响应时间低于10毫秒,卓著提升生产节拍。机械手通过气动驱动实现物料搬运,适用于轻型货物分拣。

机械手的驱动系统直接影响其运动性能与作业稳定性,不同驱动方式的技术特性差异明显。液压驱动式机械手借助液压油的压力传递动力,具备负载能力强、运动平稳的特点,适合重载作业场景,但系统结构相对复杂,需配备液压泵、油箱等辅助设备,且存在油液泄漏的风险。气动驱动式机械手以压缩空气为动力源,结构简单、成本较低,响应速度快,常用于轻负载、高频次的作业场景,如食品包装行业的物料抓取,但运动精度受气压波动影响较大。电动驱动式机械手通过伺服电机或步进电机提供动力,运动精度高、控制灵活,且清洁环保,是当前应用范围较广的驱动类型,适配电子、精密制造等对精度要求较高的行业。全自动冲床机械手配备模内监控系统,分离不合格冲压件。四川机械手设计
注塑机机械手通过总线通信,与注塑机实现生产节拍同步。四川机械手设计
工业机械手是金属加工车间的重要设备,通过六轴关节结构实现复杂曲面的打磨、切割等作业。设备采用高刚性材质臂体,单臂负载可达500公斤,适应铸件、钢板等重型物料。在船舶制造领域,工业机械手可抓取大型分段进行焊接作业,通过激光跟踪系统确保焊缝质量。其配备的冷却装置能有效降低电机温度,适应长时间连续作业。设备表面进行防震处理,减少加工震动对精度的影响。此外,工业机械手支持离线编程,操作人员可通过仿真软件预设工艺路径,缩短现场调试时间。其模块化设计允许根据加工需求更换末端工具,如焊枪、打磨头等,提升设备利用率。四川机械手设计