商机详情 -
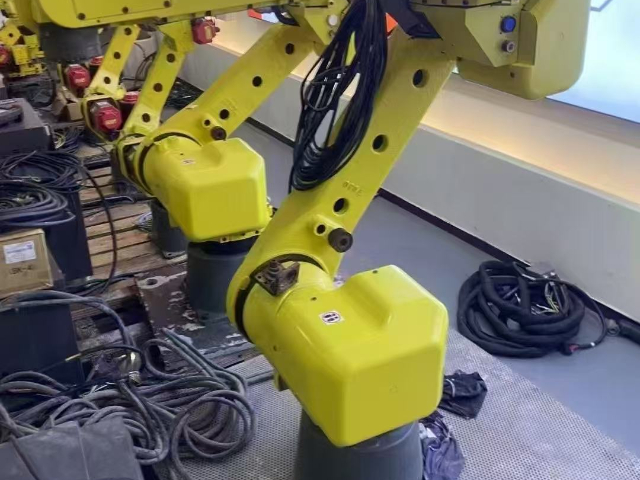
广州发那科机器人机器人外部轴改造
在工业生产中,零件的装配是一件工程量极大的工作,需要大量的劳动力,曾经的人力装配因为出错率高,效率低而逐渐被工业机器人代替。装配机器人的研发,结合了多种技术,包括通讯技术、自动控制、光学原理、微电子技术等。研发人员根据装配流程,编写合适的程序,应用于具体的装配工作。装配机器人的比较大特点,就是安装精度高、灵活性大、耐用程度高。因为装配工作复杂精细,所以我们选用装配机器人来进行电子零件,汽车精细部件的安装。机器人适应于高温、低温、高压、高辐射等极端环境。广州发那科机器人机器人外部轴改造
根据应用领域的不同,目前我国的机器人主要有三种,即工业机器人,服务机器人和特种机器人,本文所讲的即是工业机器人。工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则行动。工业机器人的零部件是组成机器人重要的装置。零部件的品质好坏直接影响了机器人的工作精度及稳定性。abb焊接机器人机器人服务电话机器人能够按照预设的程序或指令,自动完成物料的搬运、加工、装配、检测等生产任务。

随着计算机控制技术的不断进步,工业机器人将逐渐能够明白人类的语言,同时工业机器人可以完成产品的组件,这样就可以让工人免除复杂的操作。工业生产中焊接机器人系统不仅能实现空间焊缝的自动实时跟踪,而且还能实现焊接参数的在线调整和焊缝质量的实时控制,可以满足技术产品复杂的焊接工艺及其焊接质量、效率的迫切要求。另外随着人类探索空间的扩展,在极端环境如太空、深水以及核环境下,工业机器人也能利用其智能将任务顺利完成。
工业机器人的机械结构系统由机座、手臂、末端操作器三大部分组成,每一个大件都有若干个自由度的机械系统。若基座具备行走机构,则构成行走机器人;若基座不具备行走及弯腰机构,则构成单机器人臂。手臂一般由上臂、下臂和手腕组成。末端操作器是直接装在手腕上的一个重要部件,它可以是二手指或多手指的手抓,也可以是喷漆枪、焊具等作业工具。随着传感技术,包括视觉传感器、非视觉传感器以及信息处理技术的发展,出现了第二代机器人——有感觉的机器人。它能够获得作业环境和作业对象的部分相关信息,进行一定的实时处理,引导机器人进行作业。第二代机器人已在工业生产中得到了广泛应用。工业机器人能够更加适应复杂多变的生产环境,进一步提升生产效率和产品质量。

搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。搬运机器人主要由机器人本体、感知系统、控制系统和电力系统组成。机器人本体是搬运机器人的部件,负责移动、捡起、搬运物体等工作。感知系统用于感知周围环境,包括激光雷达、相机等传感器。控制系统则负责对机器人进行指令控制,让机器人完成各种任务。电力系统为机器人提供能量。工业机器人采用了人性化的操作界面和简洁控制方式,使操作人员轻松掌握机器人的操作方法,提高生产效率。济南库卡机器人
从汽车制造到电子组装,从食品加工到医药生产,工业机器人的身影无处不在,它们如生产线上的“超级工人”。广州发那科机器人机器人外部轴改造
工业机器人定义为"其操作机是自动控制的,可重复编程、多用途,并可以对3个以上轴进行编程。它可以是固定式或者移动式。在工业自动化应用中使用"。操作机又定义为"是一种机器,其机构通常由一系列相互铰接或相对滑动的构件所组成。它通常有几个自由度,用以抓取或移动物体(工具或工件)。"所以对工业机器人可能理解为:拟人手臂、手腕和手功能 的机械电子装置;它可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求。广州发那科机器人机器人外部轴改造