商机详情 -
四川三抽直交机械手模具厂家
直交机械手的驱动与控制系统:驱动系统堪称直交机械手的“动力心脏”,常见的驱动方式包括电机驱动与气动驱动。电机驱动中,伺服电机凭借其准确的转速与位置控制能力,成为主流选择,能够使机械手实现微米级别的定位精度,满足精密装配、电子加工等行业的高要求。气动驱动则以其响应速度快、成本较低的特点,在一些对精度要求相对不高、但追求快速动作的场合得到应用,如物料搬运的初级阶段。控制系统则像是机械手的“大脑”,通过编写特定的程序,能够精确控制驱动系统的运行,协调各轴的运动,实现复杂的动作组合与任务流程。同时,先进的控制系统还具备故障诊断、参数调整等功能,方便操作人员进行设备维护与优化。 寿命长的直坐标机械手,不受加工精度及润滑过多影响!四川三抽直交机械手模具厂家
直交机械手的技术创新趋势:随着科技的不断进步,直交机械手正朝着智能化、高精度、高速度和轻量化的方向发展。在智能化方面,引入人工智能和机器学习技术,使直交机械手能够根据生产环境和任务需求实时调整运动策略,实现自主决策和自适应控制。高精度方面,通过采用更先进的传感器技术、精密制造工艺以及优化的运动控制算法,进一步提高机械手的定位精度和重复定位精度,满足日益增长的精密制造需求。高速度上,研发高性能的驱动系统和轻量化的结构材料,减少运动部件的惯性,提高机械手的运行速度和响应速度。轻量化则有助于降低能耗、提高运动灵活性,同时减少对安装基础的要求,便于在更多场景中应用,这些技术创新趋势将推动直交机械手在未来工业自动化领域发挥更为重要的作用。 宁夏悬臂型中负载直交机械手针对应用提供灵活的直交机械手重要零配件搭配方案,满足需求!
直交机械手的驱动系统是其实现高效运动的动力源泉。常见的驱动方式有伺服电机驱动与步进电机驱动。伺服电机驱动凭借其高响应速度、高精度控制以及良好的转矩特性,能够使机械手在高速运行的同时保持准确的定位,适用于对运动精度和速度要求较高的作业场景。步进电机驱动则以其结构简单、成本较低的优势,在一些对精度要求相对不高,但需要实现简单、准确定位的场合得到广泛应用。此外,部分直交机械手还采用气动或液压驱动方式,以满足特定工况下对大负载、高推力的需求,为不同行业的应用提供了多样化的驱动选择。在食品包装行业,直交机械手同样展现出很好的性能。食品包装作业对卫生标准和生产效率要求极高,直交机械手能够在洁净的环境中稳定运行。它可以快速抓取食品,并将其准确放置于包装容器内,实现高效的食品装填。在包装封口环节,机械手可精确控制包装材料的输送与封口动作,确保包装的密封性良好。同时,通过灵活的编程设置,直交机械手能够适应不同规格、形状的食品包装需求,有效提高食品包装的生产效率与包装质量,保障食品在包装过程中的卫生与安全,为食品行业的发展提供有力支持。
直交机械手的发展起源:直交机械手的发展可追溯到上世纪工业自动化兴起的时期。早期,工业生产对自动化设备的需求逐渐增长,简单的直线运动机构开始出现,它们为直交机械手的诞生奠定了基础。随着机械制造工艺的进步以及电子技术的发展,**初的直交机械手雏形开始形成,其结构相对简单,功能也较为单一,主要应用于一些对精度和速度要求不高的生产环节。但这些早期尝试为后续的技术革新积累了宝贵经验。进入20世纪后期,随着计算机技术和传感器技术的融入,直交机械手迎来了快速发展阶段,精度、速度和可靠性得到大幅提升,应用领域也不断拓展,从**初的简单物料搬运逐步涉足到精密装配、检测等复杂生产流程。 点胶作业时,直交机械手动作准确,胶点均匀,品质上乘!
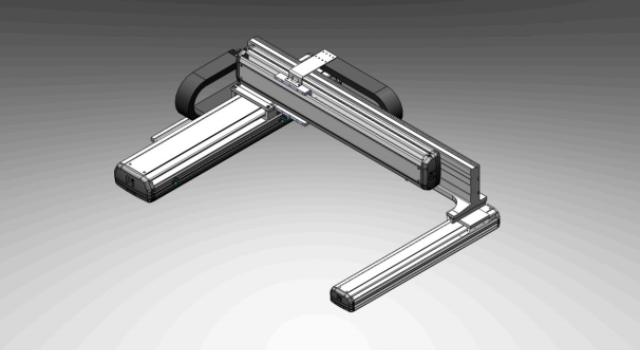
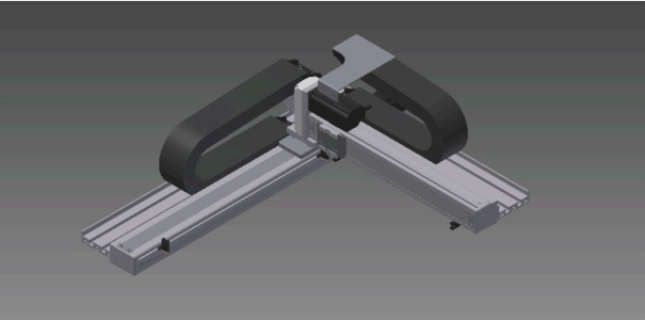
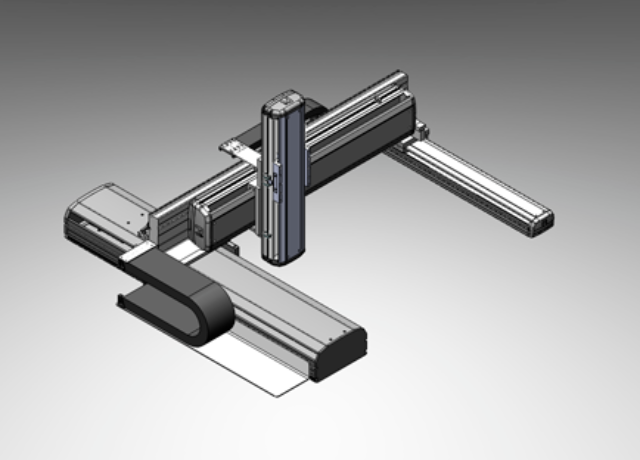
直交机械手通常由X、Y、Z三个轴组成,通过这三个轴的协同运动,实现机械手在三维空间内的精确定位。其结构设计遵循直角坐标系原理,各轴相互垂直,使得运动路径清晰、简单,便于编程与控制。以常见的悬臂式直交机械手为例,X轴一般负责水平方向的左右移动,Y轴实现前后位移,Z轴则完成垂直方向的升降动作。这种结构设计使得机械手能够灵活地在工作区域内穿梭,准确地到达目标位置,广泛应用于各类自动化生产线,如电子制造中的元件贴片、机械加工中的物料搬运等场景,为高效生产提供了基础保障。直交机械手的构造包含多个关键组件。滚珠丝杆是实现高精度直线运动的重要部件,它将回转运动转化成直线运动或将直线运动转化为回转运动,具有高精度、高效率、高刚性等特点。直线导轨则为机械手的运动提供精确导向,保证运动的平稳性和重复性,能有效承受来自不同方向的载荷。强度高的铝合金型材构成了机械手的框架主体,其质量轻、强度高,既降低了整体重量,利于提高运动速度,又确保了结构的稳定性。此外,联轴器用于连接电机与丝杆等部件,传递扭矩,保障动力的有效传输,这些组件协同工作,赋予了直交机械手良好的性能。 龙门式直交机械手,稳固可靠,适合大型物件搬运!宁夏悬臂型中负载直交机械手
滚轮导轨运动机构,承载能力强,刚性佳,值得信赖!四川三抽直交机械手模具厂家
直交机械手的控制系统是其重要部分,负责对机械手的运动进行精确控制和管理。该系统通常由控制器、驱动器、传感器以及控制软件等组成。控制器作为整个系统的大脑,接收来自外部设备的指令和传感器反馈的信息,并根据预设的控制算法生成控制信号,发送给驱动器。驱动器则根据控制器的信号,驱动电机运转,从而实现机械手的运动控制。传感器实时监测机械手的位置、速度、加速度等参数,并将这些信息反馈给控制器,以便进行实时调整和优化。控制软件则为用户提供了一个友好的操作界面,用户可以通过编程的方式设置机械手的运动轨迹、速度、加速度等参数,实现不同的工作任务。先进的控制系统还具备故障诊断和报警功能,能够及时发现并解决系统故障,保证机械手的正常运行。 四川三抽直交机械手模具厂家