商机详情 -
北京通用力控打磨
石英片,通常由石英熔炼并切割磨制而成,其二氧化硅含量可达%以上。硬度为莫氏七级,具有耐高温、热膨胀系数低、耐热震性和电绝缘性能良好等特点。通常为无色透明类,可见光透过率85%以上,石英片的光学性能有其独到之处,它既可以透过远紫外线,是所有透紫外材料比较好的,又可透过可见光可近红外光谱。由于石英玻璃耐高温,热膨胀系数极小,化学稳定性好,气泡、条纹、均匀性、双折射又可与一般光学玻璃媲美,所以它是在各种恶劣场合下工作具有高稳定度光学系数的必不可少的光学材料,石英片的形成是由于其熔体高温黏度很高引起的结果。用于制作半导体、电光源器、半导通信装置、激光器,光学仪器,实验室仪器、电学设备、医疗设备和耐高温耐腐蚀的化学仪器、化工、电子、冶金、建材以及**等工业,应用十分普遍。在石英片的加工过程中,有时会利用到打磨装置进行对石英片表面的打磨,从而提高石英片产品的质量,而在打磨装置进行对石英片进行打磨的时会产生大量的粉尘,若打磨装置没有良好的清洗功能作为支撑,将会影响产品质量。大儒科技的智能柔性打磨力控系统可以提高石英片加工效率解决上述背景技术中提出的技术问题。力控执行器的轴向方向为执行工具提供合适的缓冲行程。北京通用力控打磨

有色金属,狭义的有色金属称非铁金属,是指铁、锰、铬以外的所有金属的统称;广义的有色金属还包括有色合金,有色合金是以一种有色金属为基体,加入一种或几种其他要素而组成的合金。在电脑的主板中金属的含量占大概50%,其中主要的有价金属都是有色金属,有色金属经过切割、冲压、打磨、抛光等工艺加工制成电脑主板上的各种零件。现有的有色金属加工打磨抛光装置存在因管状金属固定不牢固而致使影响抛光和打磨效用。因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很大。在打磨过程中引入打磨力控系统提高了工件的打磨质量,加工效率以及设备安全性。唐山通用力控打磨技术指导打磨力控系统可降低再打磨抛光过程中的高频率振动对打磨工具和机器人生产中的共震损伤。
常规钣金箱体焊缝打磨项目简单描述:1.钣金箱体焊接成型后,必须将焊缝磨平。2.箱体焊接后变形,尺寸差异大,且工件装夹精度差。3.一般箱体为多面体,需要多角度打磨。大儒科技智能柔性打磨力控制系统解决方案大儒科技的的力控系统是用于力控打磨,机器人只需要按照示教轨迹做运动,柔性力由力控系统自行完成,用户输入所需要的力值,即可轻松实现智能力控打磨。大儒科技的智能柔性打磨力控系统(ForceControlSystemofintelligentflexiblesaning,简称DFC),前端可搭载多种工具,如气磨机、角磨机、直磨机、砂带机、拉丝机、旋转锉等,适用于不同的应用场景。更多案例访问官网:车窗框焊缝打磨、新能源电池框打磨、新能源电池电极打磨、新能源电池护板打磨等。
随着社会的发展和科技的进步,人们对工件的外观面要求逐渐变高,因此需要对工件进行打磨工艺,当需要打磨大批量工件,而且工件的内壁面和外壁面同时都需要打磨时,如果采用传统的流水线制作模式,通过人工打磨效率低,同时打磨后的效果得不到保证,综合成本高,且打磨后的碎屑容易残留在工件上,不利于标准化生产。目前在工件加工完成后经常需要使用打磨机对其包面进行打磨,使其表面光滑均匀。现有的打磨机一般均为手持式打磨机,工作人员需要手持打磨机然后对工件表面进行打磨处理。这种方式存在以下缺陷:在面对圆柱形杆或者是圆柱形管等圆形形的工件时,因为工件表面均为弧面,工作人员对工件打磨时比较费力,且打磨出来的工件表面很难保持平整性,很有可能影响后续工件的使用。针对现有技术存在的不足,大儒的只能柔性打磨力控系统具有的打磨过程中的柔性力控制,能帮助工作人员更方便打磨圆柱形工件。打磨力控系统可以实现智能打磨生产中工件打磨表面效果取得一致。

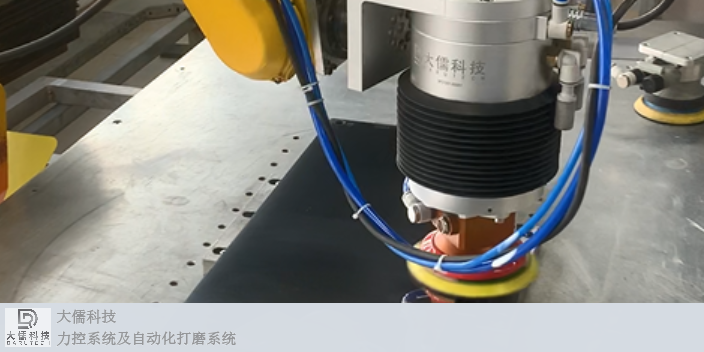
技术特征:1.一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:包括安装在工作台(1)上的六轴机器人(4)、打磨机构(5)、输送机构(3)以及连接在输送机构(3)上的定位夹紧机构(2);所述的打磨机构(5)包括连接板(5-1)、固定夹座(5-2)以及气磨(5-3)或电磨,所述的连接板(5-1)安装在六轴机器人(4)的手腕末端(4-1),连接板(5-1)上设有固定夹座(5-2),气磨(5-3)或电磨安装在固定夹座(5-2)上,至少两个活动软管(5-6)通过吸尘固定座(5-5)连接在连接板(5-1)上,活动软管(5-6)与吸尘器(7)连接相通,活动软管(5-6)的吸口位于气磨(5-3)或电磨的磨头(5-4)处;所述的输送机构(3)包括带磁性开关的导轨无杆气缸(3-7)、托盘(3-6)以及电缆保护链(3-1),导轨无杆气缸(3-7)和电缆保护链(3-1)平行设置,导轨无杆气缸(3-7)和电缆保护链(3-1)的前端安装在工作台(1)上,托盘(3-6)安装在导轨无杆气缸(3-7)的活动侧上并能前后运动,导轨无杆气缸(3-7)在两端安装有油压缓冲器(3-4),电缆保护链(3-1)后端通过连接块(3-2)与托盘(3-6)连接,电气快插插座(3-3)安装在连接块(3-2)上,托盘(3-6)上设用于连接底板(2-5)的螺纹孔和销孔(3-5);所述的定位夹紧机构(2)包括底板(2-5)、仿形定位座。智能柔性打磨力控系统可以用于机器人柔性打磨使用。北京通用力控打磨
大儒科技的打磨力控系统的特点:打磨压力可实时控制,响应迅速。北京通用力控打磨
市场上通常力传感器与机器人来实现柔性打磨。机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。其中国产的力传感器价格适中,性能也不错,量程50Nm的5000左右,跟HD的谐波减速器价格相当,很多企业能够接受。因为伺服系统中的位置传感器精度非常高,力矩传感器远没有位置传感器那样高精度,力矩传感器信号标准差为。另外,机器人中安装有力矩传感器,有一个比较大的缺陷:刚性降低,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚性相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚性是它的近10倍。我们知道,传统机器人在做位置控制时,是希望传动刚性伟大越好的。当刚性过低时,不光是控制精度下降,系统也容易不稳定。另外通过只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号,得出信号质量并不是很好,这跟系统刚性下降有关。这是由于电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚性系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,使得测量的力矩不够稳定。这种不稳定的力矩信号。北京通用力控打磨
大儒科技(苏州)有限公司坐落在方泾路2号,是一家专业的大儒科技主要产品有:力控系统(机器人打磨抛光**),模块化打磨抛光工站、柔性打磨机器人等自动化打磨系统,主要为企业提供自动化打磨抛光系统,自动化上下料系统的研发,设计,销售及完善的售后服务。 货物进出口;技术进出口(依法须经批准的项目,经相关部门批准后方可开展经营活动,具体经营项目以审批结果为准) 一般项目:软件开发;机械设备批发;金属制品批发;电气设备批发;五金产品批发;人工智能双创服务平台;网络与信息安全软件开发;集成电路芯片设计及服务;技术服务、技术开发、技术咨询、技术交流、技术转让、技术推广;智能机器人销售;人工智能硬件销售;智能机器人的研发;电子元器件批发;计算机软硬件及辅助设备批发;人工智能应用软件开发;信息系统集成服务;智能控制系统集成;信息技术咨询服务;信息系统运行维护服务公司。公司目前拥有专业的技术员工,为员工提供广阔的发展平台与成长空间,为客户提供高质的产品服务,深受员工与客户好评。大儒科技(苏州)有限公司主营业务涵盖力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人,坚持“质量保证、良好服务、顾客满意”的质量方针,赢得广大客户的支持和信赖。一直以来公司坚持以客户为中心、力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人市场为导向,重信誉,保质量,想客户之所想,急用户之所急,全力以赴满足客户的一切需要。