商机详情 -
上海色带导航AGV怎么样
随着物流行业的快速发展,仓储物流的效率和准确性成为了企业追求的目标。为了提高仓储物流的效率和准确性,许多企业开始引入AGV自动导航技术。AGV是一种能够自主导航的无人驾驶车辆,通过激光导航、视觉导航和惯性导航等技术,实现了在仓储场景中的自动化操作。以某大型电子产品制造企业为例,该企业的仓储物流需求非常庞大,每天需要处理大量的原材料和成品。在引入AGV自动导航技术之前,该企业的仓储物流存在着一些问题,比如人工操作不准确、物料堆放混乱、物料损耗较高等。为了解决这些问题,该企业决定引入AGV自动导航技术。首先,该企业在仓库内部设置了一套完善的AGV自动导航系统。通过在仓库内部安装激光导航设备和传感器,AGV能够实时感知周围环境,并根据预设的路径规划进行导航。这样一来,AGV能够准确地将物料从一个地点运送到另一个地点,提高了物料的运输效率。其次,该企业利用AGV自动导航技术优化了仓库的布局和物料的堆放方式。通过在AGV上安装视觉导航设备,AGV能够识别并定位物料的位置,从而实现自动化的物料堆放。这样一来,不仅减少了人工操作的错误率,还提高了物料的存储密度,节约了仓库的空间。此外。无人AGV,实现自动化搬运。上海色带导航AGV怎么样
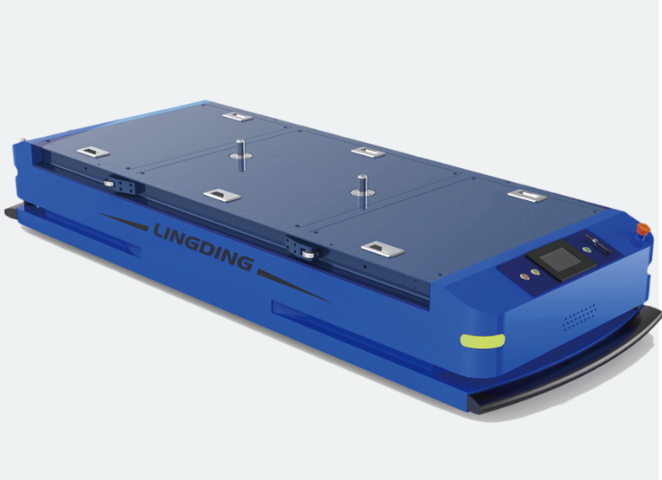
AGV(AutomatedGuidedVehicle)是一种自动导引车辆,它是一种能够在工业环境中自主行驶的无人驾驶车辆。AGV通常使用激光导航、视觉导航或磁导航等技术来实现自主导航和避障功能。AGV在工业生产中起到了重要的作用。它可以代替人工搬运物料,提高生产效率和安全性。AGV可以根据预设的路径和任务,自动将物料从一个位置运送到另一个位置,完成搬运、装卸、分拣等工作。它可以在狭小的空间中灵活移动,适应不同的工作环境。AGV具有许多优势。首先,它可以减少人力成本和人为错误。由于AGV是自动化的,不需要人工操作,可以减少人力资源的使用。其次,AGV可以提高生产效率。它可以24小时不间断地工作,不受疲劳和时间限制,可以快速、准确地完成任务。南通色带导航AGV商家AGV,智能物流的得力助手,提升仓库运作效率。
AGV小车的方案需根据客户的实际应用场景来进行定制,以满足生产需求和扩容需求。需要对应用场景做如下分析:运输环境:物料运输环境对AGV的选型有很大的影响,无论是室内和室外、高温高湿、冷藏还是暗房等等,不同的运输环境对AGV的要求差距很大。物料特点:根据运输物料的长宽高以及重量、成箱还是散料、温度、气味等情况选择合适的AGV。接口:被运送的物品与送到目的地的对接设备之间需要一个接口,这个接口的定位、识别、记录、标记以及显示等都需要对应的AGV小车,选择合适的自动化设备才能完美的完成任务。合理规划AGV小车路径,减少交通堵塞问题,一个良好的路径规划,不但可以使多台AGV小车降低道路堵塞的风险,还可以让物流系统更加顺畅,搬运效率更高。
为了实现AGV自主导航,需要根据多种传感器识别多种环境信息:如道路边界、地形特征、障碍、引导者等。AGV通过环境感知确定前进方向中的可达区域和不可达区域,确定在环境中的相对位置,以及对动态障碍物运动进行预判,从而为局部路径规划提供依据。目前,多传感器信息融合技术已经被应用于AGV导航系统中,其所起的作用关系着机器人的智能化水平。这种技术的**在于可以有效地对多传感器收集到的信息进行处理和融合,提高AGV自身对于不确定信息的抵抗能力,确保有更多可靠的信息被利用,有助于AGV更为直观地判断出周围的环境。AGV的应用,降低了物流行业的能源消耗和碳排放。

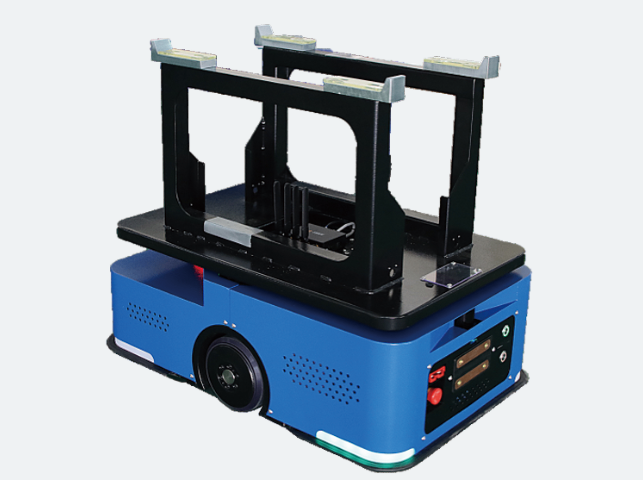
光学导航是在AGV的行驶路径上涂漆或粘贴色带,通过对摄像机采入的色带图像信号进行简单处理而实现自动导引。该导航方式分为色带跟踪导航、二维码识别等功能。光学导航技术成熟,应用也较为***。目前,亚马逊应用的KIVA机器人就是利用光学导航实现的。该导航方式灵活性比较好,地面路线设置简单易行,但对色带的污染和机械磨损十分敏感,对环境要求过高,导引可靠性较差,精度较低。激光导航是在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。此项技术比较大的优点是,AGV定位精确,地面无需其他定位设施,行驶路径可灵活多变,能够适合多种现场环境。缺点是制造成本高,对环境要求比较苛刻(外界光线、地面要求、能见度要求等),不适合室外(尤其是易受雨、雪、雾的影响)应用。AGV智能调度系统,实现多车协同作业,提升效率。马鞍山AGV供应商
高效AGV,提升仓储效率。上海色带导航AGV怎么样
路径规划是导航的一个重要环节。AGV根据环境的变化,对环境信息进行收集和分析,按照某一性能进行搜索,进而找出从起点到目标点的比较好无碰撞路径或次优无碰撞路径;能够处理环境模型中的不确定因素和路径跟踪中出现的误差,使外界对机器人的影响降到**小;利用已知信息来引导AGV动作,从而得到相对更优的行为策略。根据AGV掌握环境信息的程度不同,可分为两种类型:一个是基于环境信息已知的全局路径规划,另一个是基于传感器信息的局部路径规划,后者环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。上海色带导航AGV怎么样