商机详情 -
合肥智能AGV一般多少钱
惯性导航:惯性导航是在AGV上安装陀螺仪,利用陀螺仪可以获取AGV的三轴角速度和加速度,通过积分运算对AGV进行导航定位,惯性导航优点是成本低,短时间内精度高,但这种导航方式缺点也特别明显,陀螺仪本身随着时间增长,误差会累积增大,直到丢失位置,堪称是“***硬伤”。使得惯性导航通常作为其他导航方式的辅助。如同上文所提到的二维码导引+惯性导航的方式,就是在两个二维码之间的盲区使用惯性导航,通过二维码时重新校正位置。AGV智能搬运,助力企业腾飞。合肥智能AGV一般多少钱
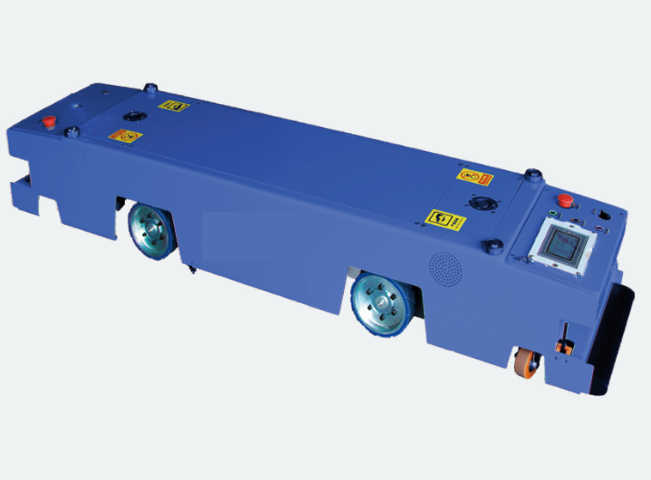
衡量AGV性能好坏的主要指标有:导航系统、驱动装置、转向装置、精确停车装置、运动控制器、蓄电池和充电系统、通讯装置、移栽装置等。在对AGV进行选型前,我们需要对现场物料情况进行详细的了解,主要在以下几点:物料的搬运方式;物料的尺寸及重量/物料车的尺寸;定位精度的要求;工作周期的要求;实际现场工作环境;了解到这些信息后,再对AGV进行具体选型是比较合适的。所谓合适,是在满足自动化物流系统、实际工艺生产的要求及使用场合前提下的一个说法,也是实现AGV小车的应用比较好性价比。AGV的选型主要包括基本参数和性能指标的选择、导航方式的选择、移栽方式的选择,在能够保证高效地完成各种自动化搬运的同时获得相对较高的性价比。金华色带导航AGV商家AGV的广泛应用,推动了物流行业的智能化发展。

无反射板激光自主导航技术是艾吉威机器人自主研发的,获得国家发明专利。该导航技术无需安装反射板即可实现激光导航AGV小车的定位和避障,其特征在于:无需辅助导航标志,快速自建地图,柔性程度高,可适应布局变动;维护成本低,可远程诊断;可与WMS、MES信息交互,实现库位管理;RFID、二维码自动选配识别托盘和货物,数据库管理;安全,人机可交互,兼容叉车手柄功能,配置**机器人叉车功能。无反射板激光自主导航叉车AGV的应用模式比较***,可以与自动化仓库系统配套使用,也可以用在工业生产线上的物流装配与物料周转。另外艾吉威还在不断开发新的应用领域及应用模式,例如辊筒叉车集成应用。目前,艾吉威无反射板激光自主导航叉车应用在汽车、家电、电子、电力、新能源等行业,且已出口海外。
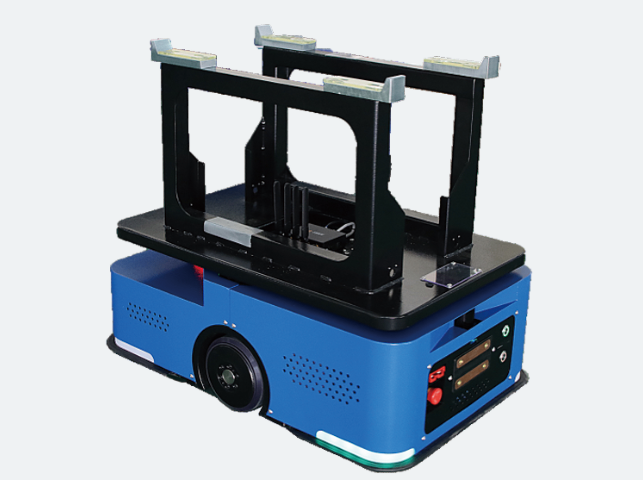
AGV(AutomatedGuidedVehicle)是一种自动导引车辆,它是一种能够在工业环境中自主行驶的机器人。AGV通常被用于物流和制造业,用于搬运和运输物品,以提高生产效率和降低人力成本。AGV具有多种形状和尺寸,可以根据不同的需求进行定制。它们通常配备有传感器和导航系统,以便能够感知周围环境并准确导航。AGV可以通过预先设定的路径或根据实时情况进行自主导航,避开障碍物并安全地完成任务。AGV的应用范围非常***。在物流领域,AGV可以用于仓库内的货物搬运、装卸和存储,以及在生产线上的物料供应。它们可以根据需求自动调度,提高物流效率和准确性。在制造业中,AGV可以用于零部件的运输和装配,以及在生产线上的物料供应和产品分拣。AGV的优势在于提高了工作效率和安全性。它们可以24小时不间断地工作,不受疲劳和人为因素的影响。同时,AGV可以减少人力需求,降低了人力成本和人为错误的风险。此外,AGV还可以提供实时数据和报告,帮助管理者更好地监控和优化生产流程。总的来说,AGV是一种高效、智能和可靠的自动导引车辆,为物流和制造业带来了许多好处。随着技术的不断进步,AGV的应用前景将更加广阔,为工业自动化带来更多的创新和发展。智能AGV,未来物流的新方向。
通过激光导航和视觉识别等技术,AGV无人车可以准确地定位和识别物料的位置和状态,实现对物料的实时追踪和管理。这对于生产过程中的物料调度、库存管理和质量追溯等方面非常重要。通过实时监控和管理,可以及时发现和解决问题,提高生产效率和产品质量。然而,AGV无人车技术在智能制造中的应用还面临一些挑战和难题。首先是技术的成熟度和可靠性。目前,AGV无人车技术虽然已经取得了进展,但仍然存在一些技术难题,如导航精度、环境适应性和安全性等方面的问题。其次是成本的考量。引入AGV无人车技术需要投资和改造,对于一些中小型企业来说可能存在经济压力。综上所述,AGV无人车技术作为智能制造的重要组成部分,具有广阔的应用前景和巨大的推动力。通过提高生产效率、降低成本和优化生产过程,AGV无人车技术将为智能制造的升级提供强有力的支持。随着技术的不断进步和应用的推广,相信AGV无人车技术将在智能制造领域发挥越来越重要的作用,为企业的发展和竞争力提供新的动力。AGV智能识别路线,减少物流运输中的错误率。松江区激光导航AGV优势
AGV智能调度,优化工作流程。合肥智能AGV一般多少钱
定位是确定移动机器人在运行环境中相对于全局坐标的位置及航向,是AGV导航的**基本环节。目前AGV定位方法分为:(1)卫星定位。它是一种以空间卫星为基础的高精度导航与定位系统。GPS定位系统用于AGV定位时存在近距离定位精度低等问题。(2)惯性定位。通过对固联在载体上的三轴加速度计、三轴陀螺仪进行积分,获得载体实时、连续的位置、速度、姿态等信息。但惯性误差经过积分之后都会产生无限的累积,因此纯惯性导航不适合长时间的精确定位。(3)电子地图匹配定位。利用图像处理技术,将实时获取的环境图像与基准图进行匹配,从而确定载体当前的位置,匹配的特征可以为设定的路标、特定的景象或是道路曲率。电子地图匹配特别适用于对机器人系统长时间的定位误差进行校准。以上定位方式中,惯性定位为相对定位方式,可以获得连续的位置、姿态信息,但存在累积误差;卫星定位、电子地图匹配等定位方式为***定位,可以获得精确的位置信息,但难以获得连续姿态信息。相对定位与***定位方式存在较强的互补性,通常采用将两者结合的组合定位方法。合肥智能AGV一般多少钱