商机详情 -
安徽专业机器人焊钳哪家好
机器人焊钳在焊接过程中,要保证熔池的稳定性,需要注意以下几点:1.控制焊接电流和电压:焊接电流和电压是影响熔池稳定性的重要因素。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接电流和电压,以保证熔池的稳定性。2.控制焊接速度:焊接速度也是影响熔池稳定性的重要因素。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接速度,以保证熔池的稳定性。3.控制焊接角度:焊接角度也会影响熔池的稳定性。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接角度,以保证熔池的稳定性。4.控制焊接气体流量:焊接气体流量也是影响熔池稳定性的重要因素。机器人焊钳需要根据焊接材料的特性和焊接工艺要求,合理设置焊接气体流量,以保证熔池的稳定性。5.检查焊接设备和焊接材料:机器人焊钳需要定期检查焊接设备和焊接材料的质量,以保证焊接质量和熔池的稳定性。机器人焊钳的操作过程中,能够实现实时监控和调整,保证焊接质量。安徽专业机器人焊钳哪家好
机器人焊钳的抗干扰能力是非常重要的,因为焊接过程中会受到很多干扰,如电磁干扰、机械振动、温度变化等。如果机器人焊钳的抗干扰能力不强,就会导致焊接质量不稳定,甚至出现焊接失败的情况。为了提高机器人焊钳的抗干扰能力,需要从以下几个方面进行优化:1.电磁屏蔽:在机器人焊钳的设计中,需要考虑电磁屏蔽的问题,采用合适的电磁屏蔽材料和结构,减少电磁干扰对机器人的影响。2.控制系统优化:机器人焊钳的控制系统需要进行优化,采用高精度的控制算法和传感器,提高控制精度和稳定性,减少机械振动对焊接质量的影响。3.温度控制:焊接过程中温度的变化会对焊接质量产生影响,因此需要采用合适的温度控制技术,保持焊接区域的稳定温度,提高焊接质量。4.故障检测:机器人焊钳需要具备故障检测和自动修复的功能,及时发现和处理故障,保证焊接过程的稳定性和可靠性。综上所述,机器人焊钳的抗干扰能力是非常重要的,需要从多个方面进行优化,提高机器人焊钳的稳定性和可靠性,保证焊接质量的稳定和一致性。安徽专业机器人焊钳哪家好机器人焊钳的使用可以减少焊接误差和缺陷,提高产品质量。

机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定。一般来说,焊接参数包括焊接电流、电压、焊接速度、焊接时间、焊接角度等。首先,焊接电流和电压是影响焊接质量的关键参数,需要根据焊接材料的种类、厚度、焊接位置等因素来确定。一般来说,焊接电流和电压需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整。其次,焊接速度和焊接时间也是影响焊接质量的重要参数。焊接速度需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整,而焊接时间则需要根据焊接材料的厚度、焊接位置等因素来进行调整。除此之外,焊接角度也是影响焊接质量的重要因素。焊接角度需要根据焊接材料的形状、焊接位置等因素来进行调整,以确保焊接质量和焊接强度。总之,机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定,需要进行多次试验和调整,以确保焊接质量和焊接强度。
机器人焊钳在灵活性方面表现出色。首先,机器人焊钳可以根据不同的焊接任务进行编程和调整,以适应不同的工件形状和大小。其次,机器人焊钳可以在不同的角度和位置进行焊接,从而实现更加复杂的焊接任务。此外,机器人焊钳还可以根据需要进行自动化控制,从而提高生产效率和质量。除此之外,机器人焊钳还可以与其他机器人和设备进行联动,以实现更加高效的生产流程。总之,机器人焊钳在灵活性方面表现出色,可以满足不同的焊接需求,并为企业提供更加高效和精确的生产服务。机器人焊钳的使用可以提高生产线的稳定性和可靠性,减少生产线停机的风险。
机器人焊钳是工业生产中常用的自动化设备,但在使用过程中也会出现故障。常见的机器人焊钳故障包括:焊接不牢、焊接位置偏移、焊接质量不佳等。以下是机器人焊钳的故障排除方法:1.检查焊接参数:焊接参数设置不当是导致焊接质量不佳的主要原因之一。检查焊接参数是否符合要求,如电流、电压、焊接速度等。2.检查焊接材料:焊接材料的质量也会影响焊接质量。检查焊接材料是否符合要求,如焊丝直径、焊丝种类等。3.检查焊接设备:焊接设备的故障也会导致焊接质量不佳。检查焊接设备是否正常工作,如焊接头、电源等。4.检查机器人程序:机器人程序的编写不当也会导致焊接质量不佳。检查机器人程序是否符合要求,如焊接路径、焊接速度等。5.检查机器人机械结构:机器人机械结构的故障也会导致焊接位置偏移等问题。检查机器人机械结构是否正常,如机械臂、焊接头等。总之,机器人焊钳的故障排除需要综合考虑多个因素,从焊接参数、焊接材料、焊接设备、机器人程序、机器人机械结构等多个方面进行检查,找出故障原因并及时解决。机器人焊钳的自动化程度高,能够实现无人化生产和智能化管理。陕西焊装线机器人焊钳报价
机器人焊钳的操作过程中能够实现多种焊接方式的切换,提高生产线的灵活性。安徽专业机器人焊钳哪家好
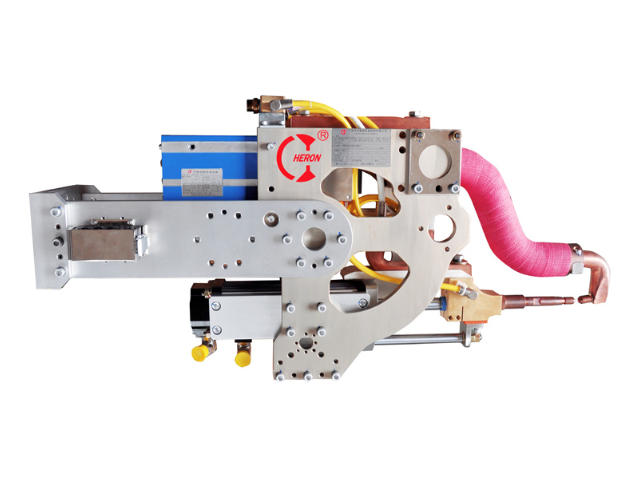
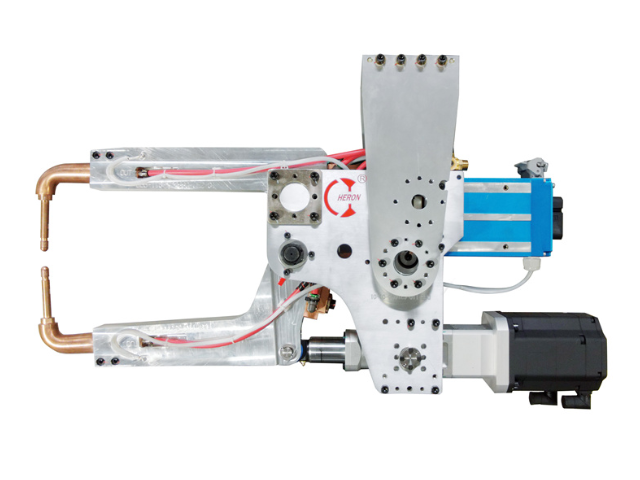
机器人焊钳的基本原理是通过机器人控制系统控制焊钳的运动,实现对工件进行焊接。机器人焊钳主要由机器人控制系统、焊钳、焊接电源、传感器等组成。机器人控制系统是机器人焊钳的主要部分,它通过控制机器人的运动轨迹和焊钳的动作,实现对工件的精确焊接。焊钳是机器人焊接的工具,它可以根据需要进行开合、旋转等动作,以适应不同的焊接需求。焊接电源是机器人焊接的能源,它提供焊接所需的电能和热能。传感器可以检测焊接过程中的温度、电流、电压等参数,以保证焊接质量。机器人焊钳的工作流程一般包括以下几个步骤:首先,机器人控制系统会根据焊接任务的要求,确定焊接路径和焊接参数。然后,焊钳会根据路径和参数进行动作,将焊接电源提供的电能和热能传递到工件上,完成焊接过程。除此之外,传感器会对焊接质量进行检测和监控,以确保焊接质量符合要求。机器人焊钳的优点是可以实现高精度、高效率的焊接,可以适应不同的焊接需求,同时还可以减少人工操作的风险和劳动强度。因此,在现代制造业中,机器人焊钳已经成为一种重要的焊接工具。安徽专业机器人焊钳哪家好