商机详情 -
石家庄全自动机器人焊钳电路图
机器人焊钳在焊接过程中,材料变形是一个常见的问题。这是因为焊接时会产生高温,导致材料膨胀和收缩,从而导致变形。为了防止材料变形,可以采取以下措施:1.控制焊接温度:通过控制焊接温度,可以减少材料的膨胀和收缩。可以使用低温焊接或者采用预热的方法来控制焊接温度。2.采用适当的焊接技术:不同的焊接技术对材料的变形影响不同。选择适当的焊接技术可以减少材料的变形。例如,采用点焊或者激光焊接可以减少材料的变形。3.采用适当的焊接参数:焊接参数的选择对材料的变形也有很大的影响。选择适当的焊接参数可以减少材料的变形。例如,选择适当的焊接速度和焊接电流可以减少材料的变形。4.采用适当的夹具:夹具的选择对材料的变形也有很大的影响。选择适当的夹具可以减少材料的变形。例如,采用弹性夹具可以减少材料的变形。总之,机器人焊钳在焊接过程中,通过控制焊接温度、选择适当的焊接技术和参数、以及选择适当的夹具,可以有效地防止材料的变形。机器人焊钳的操作过程中,能够实现远程监控和控制,提高生产管理的效率。石家庄全自动机器人焊钳电路图

机器人焊钳的抗干扰能力是非常重要的,因为焊接过程中会受到很多干扰,如电磁干扰、机械振动、温度变化等。如果机器人焊钳的抗干扰能力不强,就会导致焊接质量不稳定,甚至出现焊接失败的情况。为了提高机器人焊钳的抗干扰能力,需要从以下几个方面进行优化:1.电磁屏蔽:在机器人焊钳的设计中,需要考虑电磁屏蔽的问题,采用合适的电磁屏蔽材料和结构,减少电磁干扰对机器人的影响。2.控制系统优化:机器人焊钳的控制系统需要进行优化,采用高精度的控制算法和传感器,提高控制精度和稳定性,减少机械振动对焊接质量的影响。3.温度控制:焊接过程中温度的变化会对焊接质量产生影响,因此需要采用合适的温度控制技术,保持焊接区域的稳定温度,提高焊接质量。4.故障检测:机器人焊钳需要具备故障检测和自动修复的功能,及时发现和处理故障,保证焊接过程的稳定性和可靠性。综上所述,机器人焊钳的抗干扰能力是非常重要的,需要从多个方面进行优化,提高机器人焊钳的稳定性和可靠性,保证焊接质量的稳定和一致性。浙江专业机器人焊钳机器人焊钳的自动化程度高,能够减少人为因素对产品质量的影响。

机器人焊钳常见的故障有以下几种:1.焊钳夹紧不牢:可能是夹紧力度不够,需要调整夹紧力度;也可能是夹紧机构损坏,需要更换夹紧机构。2.焊钳夹紧不平衡:可能是夹紧机构不平衡,需要调整夹紧机构;也可能是夹紧机构损坏,需要更换夹紧机构。3.焊钳夹紧后松动:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度不够,需要调整夹紧力度。4.焊钳夹紧后无法松开:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度过大,需要调整夹紧力度。5.焊钳夹紧机构卡死:可能是机构内部零件损坏,需要更换零件;也可能是机构内部积尘过多,需要清洗维护。解决这些故障的方法包括:调整夹紧力度、更换夹紧机构、更换零件、清洗维护等。同时,对机器人焊钳进行定期维护和保养,可以有效预防故障的发生。
机器人焊钳在焊接不同材料时有很大的区别。不同的材料具有不同的熔点、热膨胀系数和热导率,这些因素都会影响焊接的质量和效率。对于焊接不同材料的情况,机器人焊钳需要进行不同的调整和设置。例如,在焊接铝合金时,由于铝的热导率高,需要使用更高的焊接电流和更快的焊接速度,以确保焊接质量。而在焊接不锈钢时,由于不锈钢的热膨胀系数低,需要使用更低的焊接电流和更慢的焊接速度,以避免产生裂纹。此外,机器人焊钳在焊接不同材料时还需要使用不同的焊接材料和焊接气体。例如,在焊接铝合金时,需要使用铝合金焊丝和纯氩气体,以避免氧化和污染。而在焊接不锈钢时,需要使用不锈钢焊丝和混合气体,以提高焊接速度和质量。总之,机器人焊钳在焊接不同材料时需要进行不同的调整和设置,以确保焊接质量和效率。这需要对不同材料的特性有深入的了解和经验。机器人焊钳的操作简单易学,只需进行简单的程序设置即可进行自动化焊接。
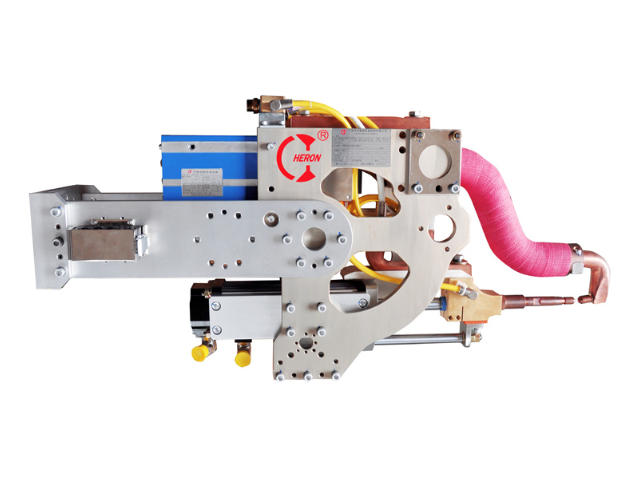
机器人焊钳是一种自动化设备,用于在制造过程中进行焊接操作。它由机器人手臂和焊钳组成,可以在工业生产线上执行高精度的焊接任务。机器人焊钳的优点在于它可以提高生产效率和质量,减少人力成本和人为错误。它可以在短时间内完成大量的焊接任务,而且焊接质量稳定,不受人为因素的影响。此外,机器人焊钳还可以在危险环境下工作,如高温、高压、有毒气体等,保障工人的安全。机器人焊钳的应用范围非常广阔,在汽车制造中,机器人焊钳可以用于车身焊接、车门焊接、底盘焊接等任务。在电子制造中,机器人焊钳可以用于电路板的焊接。在建筑结构中,机器人焊钳可以用于钢结构的焊接。总之,机器人焊钳是一种高效、高精度、安全的自动化设备,可以提高生产效率和质量,减少人力成本和人为错误,广泛应用于各个领域。机器人焊钳的控制系统稳定可靠,能够保证设备的长期稳定运行。浙江专业机器人焊钳
机器人焊钳的操作过程中,能够实现智能化决策和优化,提高生产效率和质量。石家庄全自动机器人焊钳电路图
机器人焊钳实现自动化焊接需要经过以下步骤:1.设计焊接程序:根据焊接要求和工件形状,设计出适合的焊接程序,包括焊接路径、焊接速度、焊接电流等参数。2.安装机器人焊钳:将机器人焊钳安装在焊接设备上,调整好焊接角度和位置。3.编写控制程序:编写控制程序,将焊接程序转化为机器人焊钳能够识别和执行的指令。4.进行焊接:将工件放置在焊接设备上,启动机器人焊钳进行自动化焊接。5.检测焊接质量:通过焊接质量检测设备对焊接质量进行检测,确保焊接质量符合要求。机器人焊钳实现自动化焊接具有高效、精确、稳定等优点,可以很大程度的提高焊接效率和质量,减少人工操作的繁琐和危险。石家庄全自动机器人焊钳电路图