商机详情 -
湖南造船厂叉车安全AI防撞系统工作原理
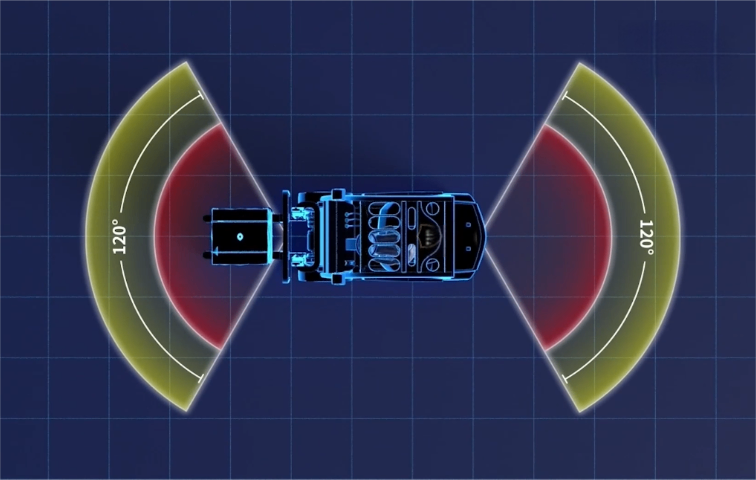
高级辅助驾驶与环境感知功能,为叉车构建多角度环境监测网络。系统具备盲区预警(BSD)、前方碰撞警告(FCW)、后方碰撞警告(RCW)等重要能力,通过前后摄像头实时识别障碍物及动态移动物体,高精度覆盖后视镜无法触及的视野盲区。DMOD三色防撞监控功能支持自定义距离阈值,通常可设置2米、3米、4米三个等级,以不同颜色在显示屏上标注障碍物距离,帮助驾驶员快速判断风险程度,尤其适用于货物堆放较高、视线受阻的仓库作业场景。智能防撞新科技,叉车安全硬道理!湖南造船厂叉车安全AI防撞系统工作原理

先进的AI防撞系统已从平面防护升级为立体空间管理。通过安装在叉车门架、顶护罩、配重块等位置的传感器阵列,系统实时构建三维安全边界模型。当检测到货叉提升时,自动上移顶部监测区域防止撞击横梁;当承载超高货物时,前向监测范围随货物高度动态延伸。对于悬空管线、消防喷头等高空障碍物,采用视觉识别与TOF测距协同工作,在车载终端显示立体风险热力图。这种空间自适应能力大幅降低了仓储设施的结构性碰撞风险,提升了场域安全运维的维度。广东钢铁厂叉车安全点检系统建材市场叉车行,芯辉守护更安心。

场域安全运维正在向预测性模式转型,将事故发生前的危险因素提前判断,及时预警提醒。通过建立包含场地布局、设备参数、作业流程的数字孿生模型,系统可模拟不同调度策略下的风险演化。机器学习算法分析历史近距事件数据,识别易发碰撞的工况组合(如高位取货同时转向倒车),提前生成风险提示。疲劳检测模块通过操作行为模式分析,在驾驶员注意力下降前建议休息。维护预测模型根据传感器性能衰减曲线,提前安排校准保养。这种预测性防护将安全管理的关口前移至风险形成阶段。
低误报率技术是该系统在实际工业场景中落地应用的重要优势之一,通过双冗余感知与智能算法迭代优化,大幅提升目标识别高精度度。系统融合高清视觉识别、动态轨迹预测与环境感知技术,可高精度区分行人与货架、托盘、货物等静态障碍物,同时能有效排除光影变化、地面杂物等干扰因素,避免将非风险目标误判为危险信号。同时,算法具备场景自适应能力,可根据叉车行驶速度、作业环境密度动态调整侦测灵敏度,在人员密集的仓库作业区提升识别精度,在空旷的户外通道适当放宽预警阈值,很大限度减少无效警报对作业效率的干扰。经多场景实地验证,系统日均误报率可控制在3次以内,既能筑牢安全防护防线,又能保障作业流程的流畅性,满足高效生产需求。建材仓库货物沉,芯辉防撞不损身。
多目标跟踪技术让系统可同时高精度监测多个移动目标,完美适配人员、叉车密集交叉作业的复杂场景。在物流仓库、制造业车间、港口装卸区等人员与车辆频繁互动的环境中,系统能同时追踪多名行人与多台叉车的运动轨迹,通过智能算法实时分析各目标间的相对位置与运动趋势,高精度预判碰撞风险,针对不同目标分别发出差异化预警提示,避免预警混乱。无论是多人并行作业、多台叉车协同搬运,还是人员与叉车交叉通行,系统都能覆盖所有风险点,不会因目标过多导致预警遗漏或误判。这种多目标同步监测能力,大幅提升了复杂作业场景的安全防护水平,保障大规模协同作业有序开展。叉车安全无小事,AI 防撞来加持!杭州内燃叉车安全声光报警灯
安全投资选芯辉,高回报不后悔。湖南造船厂叉车安全AI防撞系统工作原理
AI叉车防撞系统是面向工厂、仓库、港口码头等货运场景的AI视觉安全解决方案,以主动预警为重要,致力于提升叉车驾驶安全、防范人车及车物碰撞事故,降低企业运营中断、保险及法律相关成本。该系统采用软硬件一体化设计,搭配云端管理功能,兼顾实时风险预警与车队长期管理需求,无需人员佩戴额外传感器即可实现高精度侦测,适配主流燃油及电动叉车,安装流程简便且配置灵活,能快速融入各类现有作业体系。其工业级防护设计可应对粉尘、潮湿等复杂环境,为高人流、高货流的交叉作业场景构建基础安全防线。湖南造船厂叉车安全AI防撞系统工作原理