商机详情 -
安庆ABB52机器人
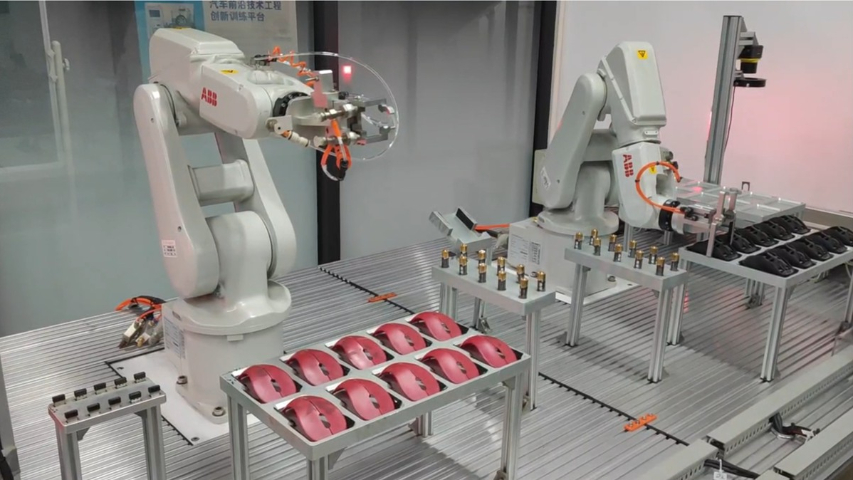
浙江展杭自动化科技采用的ABBTrueVision视觉系统包含2D/3D双模式识别功能。在汽车制造领域,我们的3D视觉解决方案采用高精度激光扫描技术(精度达),通过特征点云匹配算法,引导IRB1600机器人完成差速器总成装配。系统可自动补偿齿轮轴热变形误差,实现±,使装配不良率降低至。针对食品分拣场景,我们集成了PickMaster智能抓取系统:1)采用500万像素高速工业相机,支持RGB+近红外多光谱识别;2)基于深度学习算法,可识别12种常见物料特征(包括颜色、形状、纹理等);3)动态路径规划技术使IRB360并联机器人实现200件/分钟的分拣速度,较传统机械分拣效率提升3倍。典型案例显示,在坚果分选项目中,系统可准确识别,误抓率低于。该视觉系统已通过ISO13849安全认证,支持与MES系统数据对接,可生成完整的质量追溯报告。根据不同行业需求,我们提供定制化的光源方案(环形光、背光、同轴光等)和光学滤片配置,确保在复杂工况下的稳定识别。 润滑系统维护能减少机械部件摩擦损耗,提高能源利用效率,浙江展杭可提供润滑服务。安庆ABB52机器人
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。三明ABB机器人售后电话制动器性能测试可确保紧急停机时的安全响应,避免机械臂失控风险。

光伏组件的电池片串焊生产线上,工业机器人以微米级精度完成电池片焊接,设备的稳定性直接关系到光伏组件的发电效率和使用寿命。由于光伏行业生产节奏快,设备一旦停机损失巨大。智小杭推出 “极速修复” 售后服务,承诺接到故障报修后,1 小时内提供远程技术指导,若无法解决,工程师 8 小时内到达现场维修。在某光伏企业的生产过程中,串焊机器人的焊接头出现异常,导致焊接不良率大幅上升。智小杭工程师通过远程指导初步判断故障原因后,迅速携带备用焊接头赶赴现场, 用 2 小时就完成了焊接头的更换和调试,使生产线恢复正常。同时,为企业提供设备升级服务,根据光伏技术发展,对机器人焊接工艺、视觉识别系统进行优化,如引入新型的激光焊接技术,提高焊接效率和质量,助力企业提升产品竞争力,降低生产成本。
ABBFlexPendant示教器采用图形化交互设计,配备8英寸高灵敏度触摸屏,支持多种编程模式:轨迹编程通过可视化界面直接绘制线性/圆弧路径,系统自动生成RAPID代码集成"单步执行"调试功能,可逐指令检查运动轨迹与IO信号状态拖拽示教(Lead-throughTeaching)在力控模式下(<50N启动力),操作人员可直接拖动机器人末端至目标位姿系统以100Hz采样率记录关节角度,自动优化为平滑运动指令快速应用模板预置焊接、码垛等20+行业工艺包,支持参数化快速配置该方案使非专业人员也能在30分钟内完成基础编程,在汽车零部件柔性产线实测显示:新程序平均创建时间从4小时缩短至2小时轨迹修正效率提升80%(传统点动模式需重复定位)特别适合医疗器材、航空航天等领域的小批量(<50件)定制化生产系统符合ISO10218安全标准,所有操作数据实时同步至ABBAbility™云端备份。定期检查机械臂的应急停止按钮,防止因故障无法紧急制动,有问题找浙江展杭,保障按钮灵敏可靠。
ABBIRB910INV倒装型机器人作为工业机器人精度**,其±定位精度通过三项**技术实现:机械结构优化采用碳纤维增强臂体,热膨胀系数<μm/℃谐波减速器+直驱电机组合,传动背隙<°环境控制系统气浮隔振底座消除地面振动(隔振频率>50Hz)恒温油冷循环系统维持关节温度波动±℃闭环反馈体系激光干涉仪实时校准(采样率1kHz)六维力传感器补偿装配接触力(分辨率)典型应用案例:光刻机透镜组装∎通过纳米级运动轨迹规划,实现透镜组间距误差<10nm∎配合白光干涉仪进行在线检测,良率提升至MEMS传感器封装∎压电陶瓷驱动轴实现μm步进分辨率∎视觉-力觉混合控制完成5μm焊球精细植球该机型在半导体领域实测显示:■晶圆搬运碎片率从■MEMS器件贴装周期缩短40%。安川喷涂机器人年度保养计划,预防性维护更省心,保养找浙江展杭,延长设备使用寿命。合肥ABB6700机器人售后热线
定期更换减速器润滑油可避免齿轮异常磨损,维持传动系统0.01mm级运动精度。安庆ABB52机器人
精密模具打磨机器人要求纳米级精度,微小的机械磨损和热变形都会导致模具报废。某模具厂的打磨机器人运行 2 年后,出现模具表面光洁度不达标的问题。智小航维护团队使用原子力显微镜检测表面微观形貌,发现导轨存在纳米级磨损。团队采用离子束抛光技术修复导轨表面,对电机进行热稳定性优化,加装水冷散热装置。建立模具加工误差补偿模型,根据实时检测数据自动修正加工路径。经过维护,机器人使用寿命从 4 年延长至 6 年,模具废品率降低 70%。安庆ABB52机器人