商机详情 -
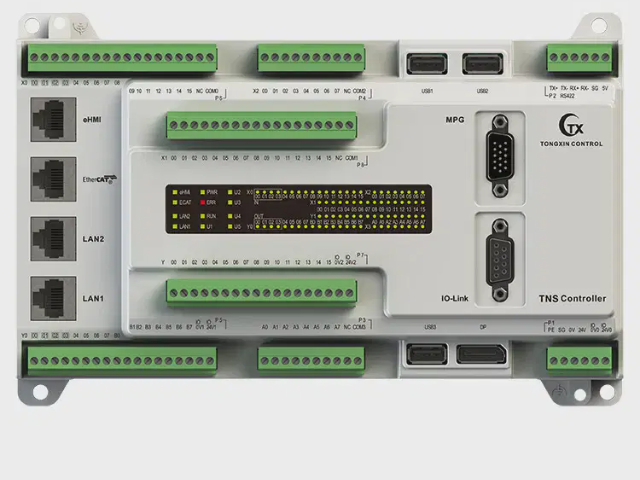
深圳同芯运动控制器工作原理
运动程序编写:编程语言选择:根据运动控制器的支持情况,选择合适的编程语言进行运动程序编写。常见的编程语言包括梯形图、指令表、C 语言、Python 等。运动指令编写:在编程语言中,使用相应的运动指令来控制电机的运动。运动指令包括点动、定位、插补等。根据实际需求,编写合适的运动指令,以实现所需的运动轨迹和动作。程序调试:在编写完运动程序后,进行程序调试。调试过程中,可以使用控制软件提供的调试工具,如单步运行、断点调试等,来检查程序的正确性和运动控制器的运行状态。根据调试结果,对程序进行修改和优化,直到满足要求为止。引入同芯运动控制器后,注塑机开合模精确度大幅提高,产品合格率升至 98% 以上。深圳同芯运动控制器工作原理

在当今工业自动化飞速发展的时代,运动控制器作为控制设备,其性能和技术水平直接影响着生产效率和产品质量。同芯智能的运动控制器应运而生,它融合了先进的控制算法和智能技术。从研发之初,同芯智能就致力于突破传统运动控制器的局限,采用了多核处理器架构,提高了数据处理速度。其创新的运动控制算法,能够根据不同的运动任务自动调整控制参数,实现准确的轨迹规划和速度控制。与传统运动控制器相比,同芯智能运动控制器在处理复杂运动任务时,响应速度更快,误差更小,为工业自动化生产带来了更高的稳定性和可靠性。无论是在高速运转的机械设备,还是对精度要求极高的电子制造设备中,同芯智能运动控制器都能发挥出优良的性能。
plc处理器同芯运动控制器,稳定性高,抗干扰力强,保障设备在恶劣电磁环境下 24 小时不停转。

控制算法运算:根据位置偏差以及其他控制参数(如速度、加速度等),运动控制器运用特定的控制算法进行运算,以生成合适的控制信号。常用的控制算法包括比例 - 积分 - 微分(PID)控制算法及其变种。PID 控制器根据位置偏差的比例(P)、积分(I)和微分(D)值来调整控制输出,通过不断地调整控制信号,使实际位置逐渐接近目标位置,减小位置偏差。例如,当位置偏差较大时,控制器会输出较大的控制信号,使电机加速运动;当接近目标位置时,控制器会逐渐减小控制信号,使电机减速并准确停在目标位置。
信号处理算法运算:运动控制器接收到指令信号和反馈信号后,会根据内置的控制算法进行运算。常见的控制算法有PID(比例-积分-微分)控制算法,它会比较指令信号和反馈信号之间的偏差,然后根据比例、积分和微分三个环节的计算结果,输出一个控制量,用于调整电机的运行状态,使偏差逐渐减小,模块终实现电机的精确控制。轨迹规划:如果需要电机按照特定的轨迹运动,运动控制器还会进行轨迹规划。它会根据目标位置和运动约束条件,计算出电机在每个时刻应该达到的位置、速度和加速度,并生成相应的控制指令。例如在机器人的运动控制中,运动控制器需要根据机器人的运动路径,规划出每个关节电机的运动轨迹。运动控制器如精密指挥家,高效调控机械运动轨迹,确保设备运行稳定、动作精确无误。
速度控制:运动控制器能够根据系统需求精确地调节电机的转速。在机床加工中,对于不同材质和加工工艺,需要不同的切削速度,运动控制器可以实时调整电机转速,确保刀具以合适的速度进行切削,提高加工效率和质量。位置控制:可实现对电机位置的精细定位。在自动化生产线的搬运环节,运动控制器控制机械手臂准确地抓取和放置物品到指定位置,误差可以控制在极小范围内,保证生产过程的准确性和稳定性。加速度和减速度控制:能够平滑地控制电机的加速和减速过程。在电梯运行中,运动控制器合理控制电梯的加减速,使乘客在乘坐过程中感受到平稳舒适,避免因速度突变而带来的不适。多轴运动控制器使机械臂各轴协同,灵活完成复杂任务,如精密零件的装配。深圳自动化控制器哪个好
同芯运动控制器抗干扰性强,在复杂电磁环境下精确控位,确保设备稳定运行,减少故障停机。深圳同芯运动控制器工作原理
开放架构设计:采用开放的架构设计,允许用户方便地进行二次开发和扩展。提供标准的接口和协议,支持第三方软件和硬件的集成,提高运动控制器的灵活性和适应性。多协议兼容:支持多种通信协议,如以太网、CANopen、Profibus 等,方便与不同类型的设备进行通信和联网。在工业自动化系统中,运动控制器能够与 PLC、传感器、执行器等设备实现无缝连接和数据交互,构建完整的自动化控制系统。
国产运动控制器正处于快速发展阶段,技术创新是其在市场竞争中脱颖而出的关键。 深圳同芯运动控制器工作原理