商机详情 -
广东绕线机系列控制器程序上传
调试和监控功能:好的运动控制器应具备完善的调试和监控功能,如实时显示电机的运行状态、参数设置、故障诊断等。通过这些功能,用户可以方便地进行系统调试和维护,提高工作效率。
成本因素:在满足应用需求的前提下,要考虑运动控制器的价格。不同品牌、型号的运动控制器价格差异较大,要根据预算选择性价比高的产品。可靠性:运动控制器的可靠性直接影响到整个系统的运行稳定性。选择具有良好口碑、经过市场验证的品牌和产品,同时要考虑产品的防护等级、抗干扰能力等因素,以确保在恶劣的工业环境下能够稳定可靠地运行。 电子厂的运动控制器小巧灵活,有效控制贴片动作,助力微型元件高效组装。广东绕线机系列控制器程序上传

控制算法运算:根据位置偏差以及其他控制参数(如速度、加速度等),运动控制器运用特定的控制算法进行运算,以生成合适的控制信号。常用的控制算法包括比例 - 积分 - 微分(PID)控制算法及其变种。PID 控制器根据位置偏差的比例(P)、积分(I)和微分(D)值来调整控制输出,通过不断地调整控制信号,使实际位置逐渐接近目标位置,减小位置偏差。例如,当位置偏差较大时,控制器会输出较大的控制信号,使电机加速运动;当接近目标位置时,控制器会逐渐减小控制信号,使电机减速并准确停在目标位置。运动控制卡与运动控制器医疗设备中的运动控制器,以超高精度控制部件运行,为精确诊断与医疗提供可靠保障 。

信号处理算法运算:运动控制器接收到指令信号和反馈信号后,会根据内置的控制算法进行运算。常见的控制算法有PID(比例-积分-微分)控制算法,它会比较指令信号和反馈信号之间的偏差,然后根据比例、积分和微分三个环节的计算结果,输出一个控制量,用于调整电机的运行状态,使偏差逐渐减小,模块终实现电机的精确控制。轨迹规划:如果需要电机按照特定的轨迹运动,运动控制器还会进行轨迹规划。它会根据目标位置和运动约束条件,计算出电机在每个时刻应该达到的位置、速度和加速度,并生成相应的控制指令。例如在机器人的运动控制中,运动控制器需要根据机器人的运动路径,规划出每个关节电机的运动轨迹。
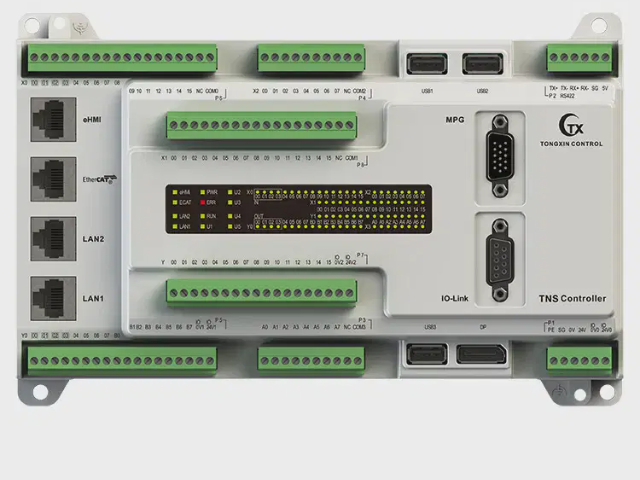
硬件连接:电源连接:根据运动控制器的电源要求,将其连接到合适的电源上。确保电源的稳定性和可靠性。电机连接:将运动控制器与电机进行连接。根据电机的类型(如步进电机、伺服电机等),使用相应的电缆和接口进行连接。确保连接牢固,避免松动或接触不良。传感器连接:如果需要使用传感器来反馈运动状态或位置信息,将传感器与运动控制器进行连接。常见的传感器包括编码器、限位开关、接近开关等。根据传感器的类型和接口,选择合适的连接方式。其他设备连接:根据实际需求,将运动控制器与其他设备(如 PLC、触摸屏、计算机等)进行连接,以实现数据交换和控制。高集成度运动控制器,体积小巧却功能强大,能精确驱动多轴电机,实现复杂运动控制。
小型化与集成化:为了满足设备小型化和紧凑化的设计需求,运动控制器将朝着小型化、集成化的方向发展。将更多的功能集成到更小的芯片或模块中,减少体积和功耗,同时提高系统的可靠性和稳定性。开放式架构:开放式的运动控制器架构将成为主流,允许用户根据自己的需求进行定制化开发和扩展。用户可以方便地添加新的功能模块、算法或接口,提高系统的灵活性和适应性,满足不同行业和应用场景的特殊需求。
运动控制器控制电机的原理是通过一系列的信号处理、算法运算和功率驱动,来精确调节电机的转速、转矩、位置等参数,以实现各种复杂的运动控制任务。 在工业自动化生产线上,运动控制器大显身手,精确地操控着机械手的抓取、放置等动作。深圳国产运动控制器官网
高性能运动控制器实时响应,快速调整参数,确保数控机床加工出高精度的零部件。广东绕线机系列控制器程序上传
闭环控制反馈调节:电机在驱动信号的作用下开始运行,传感器会实时监测电机的实际运行状态,并将反馈信号再次传输给运动控制器。运动控制器会不断比较指令信号和反馈信号,根据偏差实时调整驱动信号,形成一个闭环控制系统。通过闭环控制,可以有效提高电机控制的精度和稳定性,补偿电机运行过程中的各种干扰和误差。例如,当电机受到负载变化的影响导致速度下降时,运动控制器会根据反馈信号增加驱动信号的强度,使电机恢复到设定的速度。广东绕线机系列控制器程序上传