商机详情 -
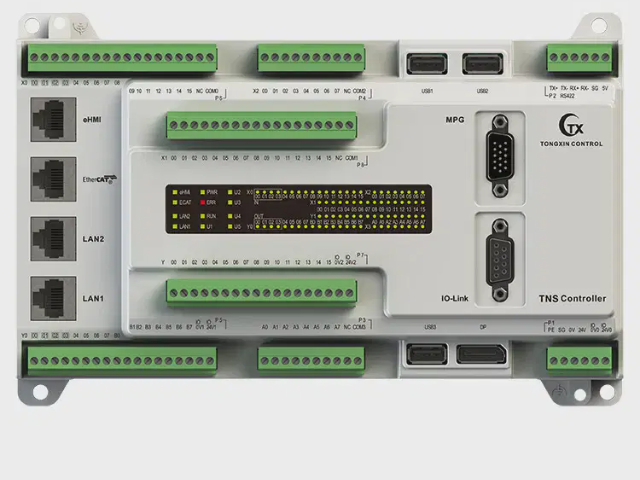
深圳Q系列同芯运动控制器驱动器
更高性能化:随着工业生产对精度、速度和效率的要求不断提高,运动控制器将具备更高的运算速度和更精确的控制能力。例如,在半导体制造等领域,运动控制器需要实现亚微米级甚至更高精度的定位控制,以及更快的运动响应速度,以满足先进工艺的需求。多轴协同与同步控制增强:多轴联动控制技术将不断发展,运动控制器能够更精细地实现多轴之间的协同运动和同步控制,使机械设备完成更复杂的运动轨迹和动作。如在机器人、数控机床等应用中,实现多个关节或坐标轴的高精度同步运动,提高生产效率和产品质量。同芯运动控制器运算能力超群,多轴同步精度达 ±0.02mm,复杂任务轻松应对。深圳Q系列同芯运动控制器驱动器

3C 电子制造:在手机、电脑等 3C 产品的生产过程中,涉及大量的精密装配、检测等工序。国产运动控制器能够精确控制机械手臂、贴片机、点胶机等设备的运动,实现高速、高精度的生产操作。例如在手机屏幕贴膜环节,运动控制器可控制贴膜设备准确地将保护膜贴合到屏幕上,提高生产效率和产品质量。汽车零部件制造:在汽车零部件的加工和装配过程中,国产运动控制器广泛应用于数控机床、机器人焊接设备、自动化搬运设备等。它可以实现多轴联动控制,确保零部件的加工精度和装配质量,满足汽车制造业大规模、高效率生产的需求。广东控制器系统具备自学习能力的运动控制器,快速适配新任务,减少调试时间,生产灵活又高效。

控制算法:不同的控制算法对运动控制的性能有很大影响。常见的控制算法有 PID 控制、模糊控制、神经网络控制等。PID 控制算法简单实用,适用于大多数工业应用;而对于一些复杂的非线性系统,模糊控制或神经网络控制可能能提供更好的控制效果。响应速度:响应速度决定了运动控制器对输入信号的反应快慢。在需要快速启停和频繁加减速的应用中,如高速包装机,要求运动控制器具有较高的响应速度,以确保设备能够高效稳定地运行。采样频率:采样频率越高,运动控制器能够更及时地获取反馈信息,从而实现更精确的控制。在高精度运动控制场合,如精密加工设备,需要较高的采样频率来保证控制精度。
控制算法运算:根据位置偏差以及其他控制参数(如速度、加速度等),运动控制器运用特定的控制算法进行运算,以生成合适的控制信号。常用的控制算法包括比例 - 积分 - 微分(PID)控制算法及其变种。PID 控制器根据位置偏差的比例(P)、积分(I)和微分(D)值来调整控制输出,通过不断地调整控制信号,使实际位置逐渐接近目标位置,减小位置偏差。例如,当位置偏差较大时,控制器会输出较大的控制信号,使电机加速运动;当接近目标位置时,控制器会逐渐减小控制信号,使电机减速并准确停在目标位置。在工业自动化生产线上,运动控制器大显身手,精确地操控着机械手的抓取、放置等动作。
小型化与集成化:为了满足设备小型化和紧凑化的设计需求,运动控制器将朝着小型化、集成化的方向发展。将更多的功能集成到更小的芯片或模块中,减少体积和功耗,同时提高系统的可靠性和稳定性。开放式架构:开放式的运动控制器架构将成为主流,允许用户根据自己的需求进行定制化开发和扩展。用户可以方便地添加新的功能模块、算法或接口,提高系统的灵活性和适应性,满足不同行业和应用场景的特殊需求。
运动控制器控制电机的原理是通过一系列的信号处理、算法运算和功率驱动,来精确调节电机的转速、转矩、位置等参数,以实现各种复杂的运动控制任务。 运动控制器的工作是将预定的控制方案与规划指令转化为期望的机械运动,实现对机械运动在位置、速度。运动控制器型号
同芯运动控制器助力激光切割机,切割速度提升 40%,切面光滑无毛刺,品质跃升。 技术特性方面。深圳Q系列同芯运动控制器驱动器
驱动信号输出:经过控制算法运算后,运动控制器生成的控制信号需要经过功率放大,才能驱动电机等执行机构。控制器将处理后的信号发送给电机驱动器(如伺服驱动器、步进驱动器等)。驱动器根据接收到的信号,调整电机的电压、电流和频率等参数,从而控制电机的转速、转向和转矩。例如,对于伺服电机,驱动器根据控制器的信号精确调整电机的输出,使电机按照预定的轨迹和速度运动。
运动控制器是一种专门用于控制运动轴的位置、速度和加速度等参数的设备。 深圳Q系列同芯运动控制器驱动器