商机详情 -
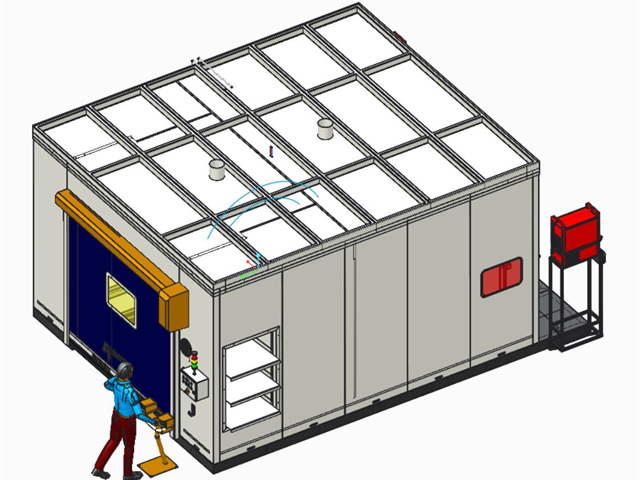
长沙激光切割工作站
能源供应与分配系统是弧焊机器人稳定运行的动力源泉,负责将外部电能转化为各部件所需的能源形式并合理分配。该系统包含主电源接口、电源转换器和分线盒等组件:主电源接口连接工厂电网,引入工业用电;电源转换器将高压交流电转换为直流低压电,适配控制系统、传感器等不同部件的电压需求;分线盒则通过多组线路将电能准确输送至机械臂电机、焊枪、送丝机构等设备。同时,系统内置过载保护模块,当某线路电流异常时,会自动切断该路供电,避免故障扩散。这种分层式能源管理设计,既能保证各部件电力供应的稳定性,又能提高系统的用电安全性。轻量化弧焊工作站便于车间不同区域灵活移动。长沙激光切割工作站
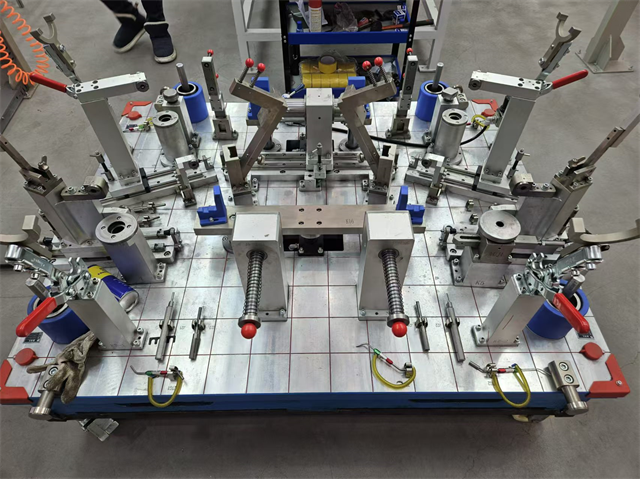
传感与检测装置为弧焊机器人提供环境感知能力,助力实现自动化与智能化焊接。常见的传感器包括电弧传感器、视觉传感器与触觉传感器:电弧传感器通过监测焊接电流与电压变化,实时判断焊枪与工件的相对位置,实现焊缝跟踪;视觉传感器借助高清相机拍摄焊缝图像,经图像处理算法识别焊缝位置与形状,为路径修正提供依据;触觉传感器则能感知焊接压力等物理量,确保工件装配与焊接过程的贴合度。这些传感装置与控制系统协同工作,可有效应对工件尺寸误差、装配偏差等问题,提高焊接质量的一致性。长沙激光切割工作站手机中框弧焊工作站记录精密焊接的电流数据。
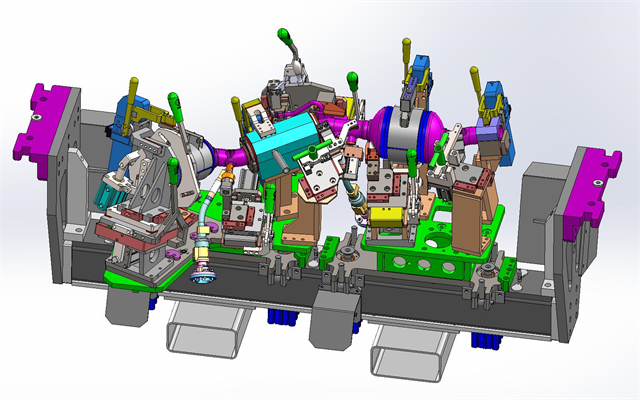
机械结构主体是弧焊机器人实现物理动作的基础框架,由多关节机械臂和底座构成。机械臂通常采用模块化设计,各关节通过高精度轴承连接,可实现多维度灵活转动,满足不同角度和位置的焊接需求。底座则为整个机械结构提供稳固支撑,其重量和结构强度经过优化,能有效减少焊接过程中的振动,保证机械臂运动时的稳定性。机械臂的材质多选用高强度合金钢材,在保证结构刚性的同时减轻自身重量,降低驱动系统的负荷。这种结构设计使机器人既能在狭窄空间内完成复杂焊接动作,又能在长时间作业中保持运动精度,适配多种工业场景的焊接任务。
焊接参数调控系统负责动态调整焊接过程中的关键参数,以适应不同的焊接材料和工艺要求。系统可精确控制焊接电流、电弧电压、焊接速度和保护气体流量等参数:当焊接材料厚度增加时,自动提高电流和电压以保证熔深;在焊接拐角位置时,适当降低速度以避免焊道堆积。部分系统还具备自适应调节功能,通过传感器监测电弧状态,实时修正参数偏差,确保焊接过程稳定。操作人员可通过触摸屏预设参数方案,系统会根据工件信息自动调用,简化操作流程的同时减少人为误差。手机外壳弧焊工作站记录的参数助力焊接工艺优化。
弧焊工作站系统集成的定制化服务,能满足不同行业的特殊需求。针对航空航天领域对焊接精度和可靠性的严苛要求,可配置高精度激光跟踪系统和特种焊接电源,确保焊缝质量达到行业标准;对于家电制造的大批量生产,集成方案可优化生产线布局,实现多工位协同作业,提高生产节拍。此外,系统还能根据客户的厂房空间、现有设备状况进行灵活调整,降低改造难度和成本。专业的技术团队会全程参与方案设计、安装调试和人员培训,确保系统快速投入使用,并提供长期的技术支持和售后服务,让企业无后顾之忧。弧焊工作站搭配高清摄像头辅助观察焊缝质量。长沙激光切割工作站
供电系统为工作站运行提供电能。长沙激光切割工作站
其智能控制系统堪称工作站的 “智慧大脑”。硬件方面,主控制器、电机驱动器与传感器紧密协作,实现对机器人运动的准确控制。软件上,通过先进编程技术,可轻松设定焊接任务流程,具备智能化任务执行能力。操作人员借助直观的人机界面,如触摸屏、按钮等,能便捷地输入指令、监控焊接进程,并获取实时反馈信息。此外,系统还支持数据管理功能,可对焊接数据进行实时监测、记录与分析,为优化焊接工艺、提高生产效率提供有力数据支撑。长沙激光切割工作站