商机详情 -
深圳压电显微注射
压电式压力传感器的优点是具有自生信号,输出信号大,较高的频率响应,体积小,结构坚固。其缺点是只能用于动能测量。需要特殊电缆,在受到突然振动或过大压力时,自我恢复较慢。压电式加速度传感器压电元件一般由两块压电晶片组成。在压电晶片的两个表面上镀有电极,并引出引线。在压电晶片上放置一个质量块,质量块一般采用比较大的金属钨或高比重的合金制成。然后用一硬弹簧或螺栓,螺帽对质量块预加载荷,整个组件装在一个原基座的金属壳体中。当传感器受振动力作用时,由于基座和质量块的刚度相当大,而质量块的质量相对较小,可以认为质量块的惯性很小。因此质量块经受到与基座相同的运动,并受到与加速度方向相反的惯性力的作用。这样,质量块就有一正比于加速度的应变力作用在压电晶片上。由于压电晶片具有压电效应,因此在它的两个表面上就产生交变电荷(电压),当加速度频率远低于传感器的固有频率时,传感器给输出电压与作用力成正比,亦即与试件的加速度成正比,输出电量由传感器输出端引出,输入到前置放大器后就可以用普通的测量仪器测试出试件的加速度;如果在放大器中加进适当的积分电路,就可以测试试件的振动速度或位移。压电显微操作器PMM利用压电元件产生的驱动力来展示其对各种样品的优异穿孔能力。深圳压电显微注射

PMM可用于移去卵细胞内的染色体,它可以用平口针迅速的穿透透明带,而无须用尖头针。含有染色体的细胞质会混进洗液管,通过透明带的孔抽取出来。PMM和传统方法相比提高了速度和准确率,也就是说增加了效率。细胞核显微注射Piezo可以轻易破坏核的细胞质膜收集核,利用平口针灸可以一次注射1个或更多的核。针在膜的表面形成一个较深的内陷,piezo就很容易破膜将核注射进去。胚胎干细胞显微注射PMM与传统尖头针相比可促进ES细胞注射入胚泡,甚至可以穿透和部分破坏内细胞群,增加ES细胞的作用。平口针的顶端直径为8-12um,大约可装15个ES细胞,用中、低档能量的脉冲,PMM即可穿透细胞群,用低能量的多次脉冲,针可穿透滋养外胚层(TE)。卵母细胞胞浆内单精子显微注射PMM通过将精子尾部与头部割离,精子头部吸入平口针,在中低档能量下即可穿透透明带,进行单精子显微注射。增加了速度和准确率,PMM为转基因鼠高效率的产品。与传统方法相比,Piezo增加了显微注射的速度和准确率,利用MII转基因的方法很有效的生成转基因鼠。透明带打孔压电平口针PMM具备快速响应的特点,能够在短时间内完成实验操作,减少了操作时间和不确定性。

压电效应:某些电介质在沿一定方向上受到外力的作用而变形时,其内部会产生极化现象,同时在它的两个相对表面上出现正负相反的电荷。当外力去掉后,它又会恢复到不带电的状态,这种现象称为正压电效应。当作用力的方向改变时,电荷的极性也随之改变。相反,当在电介质的极化方向上施加电场,这些电介质也会发生变形,电场去掉后,电介质的变形随之消失,这种现象称为逆压电效应。依据电介质压电效应研制的一类传感器称为压电传感器。
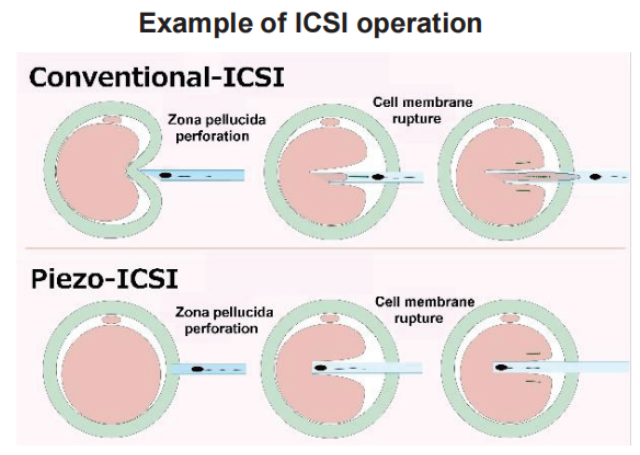
传统的压电陶瓷较其它类型的压电材料压电效应要强,从而得到了广泛应用。但作为大应边,高能换能材料,传统压电陶瓷的压电效应仍不能满足要求。于是近几年来,人们为了研究出具有更优异压电性的新压电材料,做了大量工作,现已发现并研制出了Pb(A1/3B2/3)PbTiO3单晶(A=Zn2+,Mg2+)。这类单晶的d33比较高可达2600pc/N(压电陶瓷d33比较大为850pc/N),k33可高达0.95(压电陶瓷K33比较高达0.8),其应变>1.7%,几乎比压电陶瓷应变高一个数量级。储能密度高达130J/kg,而压电陶瓷储能密度在10J/kg以内。铁电压电学者们称这类材料的出现是压电材料发展的又一次飞跃。现在美国、日本、俄罗斯和中国已开始进行这类材料的生产工艺研究,它的批量生产的成功必将带来压电材料应用的飞速发展。Piezo-ICSI 相比常规 ICSI方法,可有效提高ICSI受精率。
压电效应可分为正压电效应和逆压电效应。
正压电压电效应是指:当晶体受到某固定方向外力的作用时,内部就产生电极化现象,同时在某两个表面上产生符号相反的电荷;当外力撤去后,晶体又恢复到不带电的状态;当外力作用方向改变时,电荷的极性也随之改变;晶体受力所产生的电荷量与外力的大小成正比。压电式传感器大多是利用正压电效应制成的。
逆压电是指对晶体施加交变电场引起晶体机械变形的现象。用逆压电效应制造的变送器可用于电声和超声工程。压电敏感元件的受力变形有厚度变形型、长度变形型、体积变形型、厚度切变型、平面切变型5种基本形式。压电晶体是各向异性的,并非所有晶体都能在这5种状态下产生压电效应。例如石英晶体就没有体积变形压电效应,但具有良好的厚度变形和长度变形压电效应。 压电破膜显微操作仪利用压电元件产生的驱动力,可以良好的穿刺各类样品:如小鼠、猪、牛的卵母细胞和胚胎。日本压电PMM 6
压电破膜仪 PMM PIEZO-ICSI操作简便,医生只需掌握基本的操作技巧,即可熟练操作。深圳压电显微注射
机器人安装接近觉传感器主要目的有以下三个:其一,在接触对象物体之前,获得必要的信息,为下一步运动做好准备工作;其二,探测机器人手和足的运动空间中有无障碍物。如发现有障碍,则及时采取一定措施,避免发生碰撞;其三,为获取对象物体表面形状的大致信息。超声波是人耳听不见的一种机械波,频率在20KHZ以上。超声传感器包括超声发射器、超声接受器、定时电路和控制电路四个主要部分。它的工作原理大致是这样的:首先由超声发射器向被测物体方向发射脉冲式的超声波。发射器发出一连串超声波后即自行关闭,停止发射。同时超声接受器开始检测回声信号,定时电路也开始计时。当超声波遇到物体后,就被反射回来。等到超声接受器收到回声信号后,定时电路停止计时。此时定时电路所记录的时间,是从发射超声波开始到收到回声波信号的传播时间。利用传播时间值,可以换算出被测物体到超声传感器之间的距离。这个换算的公式很简单,即声波传播时间的一半与声波在介质中传播速度的乘积。超声传感器整个工作过程都是在控制电路控制下顺序进行的。压电材料除了以上用途外还有其它相当广泛的应用。如鉴频器、压电震荡器、变压器、滤波器等。深圳压电显微注射