商机详情 -
人形机器人伺服电动缸咨询
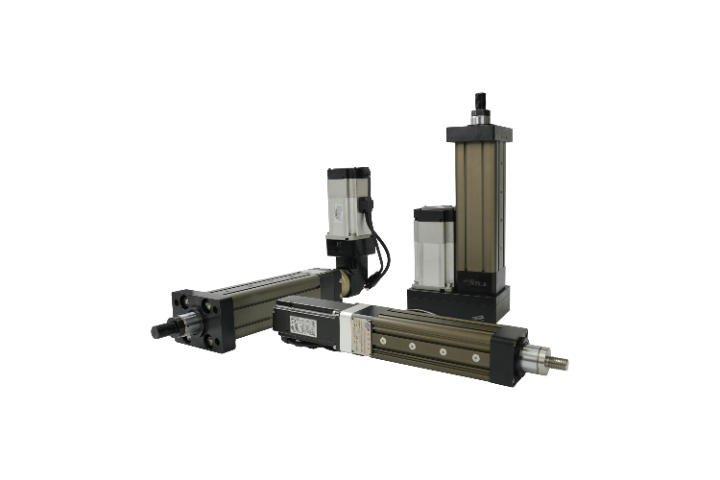
大吨位伺服电动缸以其强大的推力输出,成为重载机械、大型设备驱动系统的优先选择。其作用在于提供足够的动力,确保设备在重载或高阻力环境下的稳定运行。工作原理上,大吨位伺服电动缸采用大功率伺服电机和强化型传动机构,通过优化机械结构和控制算法提高推力输出和稳定性,为重载物料的搬运和加工提供了可靠动力。人形机器人伺服电动缸在人形机器人领域发挥着关键作用,其作用在于模拟人类关节的运动,实现机器人的灵活行走、抓取等动作。工作原理上,人形机器人伺服电动缸通常采用高精度、高响应速度的伺服电机和轻量化、比较强度的传动机构,结合先进的运动控制算法,实现机器人关节的精确控制和协调运动,为人形机器人的智能化发展提供了有力支持。精密机床伺服电动缸提升机床加工精度与稳定性。人形机器人伺服电动缸咨询
精密伺服电动缸:高精度定位与运动控制的典范:精密伺服电动缸以其极高的定位精度和重复定位精度,满足了精密加工、测量仪器等领域对微小位移的精确控制需求。其作用在于实现微米级甚至纳米级的定位精度,确保加工和测量的准确性。工作原理上,精密伺服电动缸采用高精度编码器、传感器和先进的控制算法,实时反馈运动状态并调整输出,确保运动精度和稳定性。在精密制造、光学仪器等领域,精密伺服电动缸的应用极大地提高了产品质量和生产效率,成为推动产业升级的关键技术之一。人形机器人伺服电动缸咨询水下伺服电动缸适应水下环境,驱动水下设备。
折返伺服电动缸通过特殊的机械结构,在有限空间内实现了高效的直线运动。其作用在于节省空间,同时保持高运动性能,适用于对空间要求苛刻的场合。工作原理上,折返伺服电动缸采用折返式丝杠或连杆机构,将电机的旋转运动转换为直线往复运动。这种设计不*减小了整体尺寸,还通过优化机械结构提高了运动效率和稳定性,普遍应用于精密仪器、电子设备内部驱动等领域。六自由度伺服电动缸通过集成多个运动轴,实现了空间内任意方向和角度的运动控制。其作用在于为机器人、仿真模拟等领域提供高度灵活的运动解决方案。工作原理上,六自由度伺服电动缸由多个独自的伺服电动缸和旋转关节组成,通过协同工作实现复杂的空间运动。在机器人领域,六自由度伺服电动缸用于构建机器人手臂,实现抓取、搬运、装配等多种功能,极大地提高了机器人的灵活性和适应性。
工业自动化伺服电动缸在工业自动化领域发挥着重要作用,是推动产业升级的关键设备之一。其作用在于实现生产线的自动化、智能化控制,提高生产效率和产品质量。工作原理上,工业自动化伺服电动缸通过接收控制信号,驱动机械部件实现精确运动,完成各种工业任务。在自动化装配线、机器人手臂等场景中,工业自动化伺服电动缸的应用卓著提高了生产效率和灵活性,降低了人力成本。航空伺服电动缸在航空领域发挥着关键作用,是确保飞行安全的重要部件之一。其作用在于控制飞行器的舵面、起落架等关键部件的运动,实现飞行器的精确操控。工作原理上,航空伺服电动缸采用高精度、高可靠性的伺服电机和传动机构,结合先进的飞行控制算法,实现飞行器舵面的精确控制。这种设计使得飞行器能够在各种复杂环境下稳定飞行,提高了飞行安全性。耳轴伺服电动缸用于驱动耳轴旋转,实现精确控制。

高速伺服电动缸以其极快的响应速度和运动速度,满足了高速加工、快速定位等应用场景的需求;大推力伺服电动缸则以其强大的推力输出,确保了设备在重载或高阻力环境下的稳定运行。两者在性能上不断突破极限,为工业自动化、航空航天等领域提供了更加高效、可靠的驱动解决方案。工作原理上,高速伺服电动缸采用高性能伺服电机和优化的传动机构,提高运动速度和响应速度;大推力伺服电动缸则通过增大电机功率和优化机械结构,提高推力输出和稳定性。这些高性能伺服电动缸的应用,推动了相关领域的技术进步和产业升级。进口伺服电动缸引进先进技术,提升国内设备性能。人形机器人伺服电动缸咨询
直流伺服电动缸采用直流电机,实现平稳运动控制。人形机器人伺服电动缸咨询
航天伺服电动缸在航天领域发挥着重要作用,是探索宇宙的重要工具之一。其作用在于控制航天器的姿态、推进系统等关键部件的运动,实现航天器的精确操控和任务执行。工作原理上,航天伺服电动缸采用特殊设计的伺服电机和传动机构,以适应太空环境的极端条件。同时,结合先进的航天控制算法,实现航天器姿态的精确控制。这种设计使得航天器能够在太空中稳定运行,完成各种复杂的航天任务。伺服电动缸在应用领域和工作原理上各有特色,但它们都具备高精度、高响应速度、高可靠性等共性优势。这些优势使得伺服电动缸在各个领域都发挥着重要作用,并随着技术的不断进步而不断发展。未来,随着智能制造、人工智能等技术的深入应用,伺服电动缸将在更多领域展现其巨大潜力,为产业升级和科技进步做出更大贡献。人形机器人伺服电动缸咨询