商机详情 -
长宁区桁架机械手
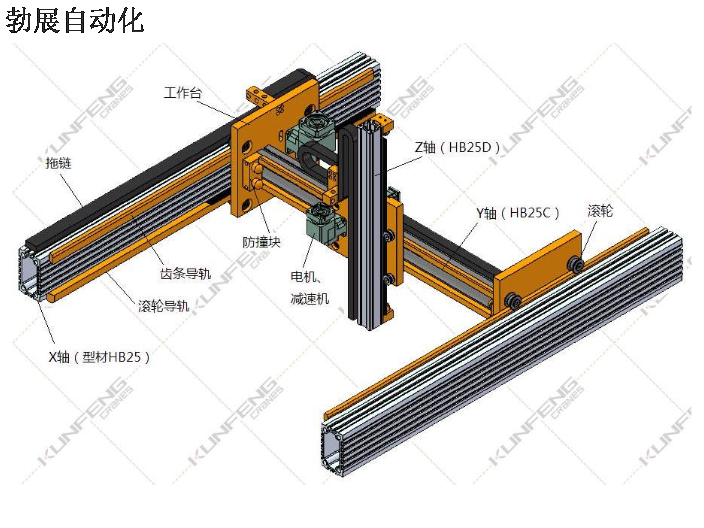
机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。其中:1,结构框架,主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管,矩形管,圆管等焊接件构成;2,X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的组件,其定义规则遵循笛卡尔坐标系。各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。结构件通常由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是机械手负载的主要承担者。导向件,常用有直线导轨,v型滚轮导轨,U型滚轮导轨,方型导轨以及燕尾槽等常用导向结构,其具体运用需根据实际使用工况以及定位精度决定。传动件,通常有电动,气动,液压三种类型,其中电动有齿轮齿条结构,滚珠丝杠结构,同步带传动,链条传统以及钢丝绳传动等。传感器检测元件,通常两端采用行程开关作为电限位,当移动组件移动至两端限位开关处时,需要对机构进行锁死,防止其超程;此外还有原点传感器以及位置反馈传感器。机械限位组,其作用是在电限位行程之外的刚性限位,俗称死限位。 桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,有想法可以来我司咨询!长宁区桁架机械手

桁架机器人知识解说!首先,咱们来说一下,什么是桁架机器人,桁架机器人是可以完成自动控制的、基于空间XYZ直角坐标系可重复编程的、多自由度、适合不同任务的自动化设备。该设备有效地改善了作业环境,提供零件加工数字化、信息化、少人化直至无人化办理,可靠地确保了产品质量,极大地提高了劳动生产率,将工人从深重的体力劳动中解放出来。使现代制作技术达到一个簇新的水平。常见的有机床上下料机器人、码垛机器人、涂胶(点胶)机器人、检测机器人、打磨抛光机器人、装配机器人、医疗机器人等。绍兴桁架机械手行走浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有想法的不要错过哦!
桁架机器人应用领域:多自由度运动,每个运动自由度之间的空间夹角为直角。自动控制的,可重复编程的,一切的运动均按程序运行。3灵活,多功用,因操作工具的不同功用也不同。高可靠性、高速度、高精度。可用于恶劣的环境,可长期工作,便于操作维修。各个机器行走轴,均可选用直线导轨,具有可高速运行,安装调试便利,适合长行程的长处。桁架机器人设备装备:框架结构:铝型材设备基础。运动组织:导轨,直线轴,伺服电机,丝杠。治具(机器手):定制。
桁架机械手结构的刚性:桁架机械手设计中的结构强度及刚性比较低会产生振动,从而造成定位精度较低;运动重量:包括机械手本身及抓取工件的重量,在桁架机械手的设计中一般会根据工件的重量来决定机械手刚性,当我拉抓取的工件重量越重时产生的惯量也就越大,所以在运动件重量增加时,定位精度会降低;控制及定位方式对精度的影响:定位方式采用挡块定位时,定位精度就会与挡块的强度及桁架机械手的运行速度有关,伺服电机定位大于挡块定位;控制采用采用液压及气压控制时,由于受气温影响气压液压会有波动,因些采用伺服控制的稳定性大于气动及液压控制;浙江勃展工业自动化设备有限公司桁架机械手设备值得用户放心。

桁架机械手具备任意角度工作的优点也就是常说的自由度,自由度也就**机械手能够在一定范围内任意角度动作,此项优点也变成了桁架机械手可以满足较为精细化的商品的生产制造需求,也更是由于多自由度工作的优点让桁架机械手能够在许多高精密零部件生产厂家的车间中得到运用。 桁架机械的控制体系: 因为每一车间针对产品生产加工的工艺流程和操作方法是不一样的,因而桁架机械手在设计时就考虑到不一样场所的运用难题,因而桁架机械手是能够根据中后期的反复程序编写及其程序编写改变等方法,让机械手依照变更后的程序代码开展抓举和搬动的,自动控制保持全部的运作均按程序执行。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,有需要可以联系我司哦!徐州桁架机械手效果图
浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,欢迎新老客户来电!长宁区桁架机械手
上下料桁架机械手通常用作机床或其他机器的附加装置,如在主动机床或主动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有**的控制装置。使用上下料桁架机械手能够替代人从事单调、重复或繁重的体力劳动,完成生产的机械化和主动化,替代人在有害环境下的手工操作,改进劳动条件,确保人身安全,因而***使用于机械制造、冶金、电子、轻工和原子能等部分。数控机床上下料桁架机械手首要由于手部和运动机构组成。手部是用来抓持工件(或工具)的部件,依据被抓持物件的形状、尺寸、重量、资料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构使手部完成各种滚动(摇摆)、机械手配件移动或复合运动来完成规则的动作,改变被抓持物件的方位和姿势。长宁区桁架机械手