商机详情 -
云南自动锁螺丝机器人解决方案
安全、易用且灵活的协作机器人正成为企业迈向自动化的理想起点。广东明睿智博机器人科技有限公司的协作机器人系列设计以人为本,具备直观的拖动示教或图形化编程功能,让生产线工人也能轻松操作和部署。其内置的高灵敏度力矩传感器和先进的碰撞检测算法,确保在无围栏环境下与人类安全共享工作空间。无论是进行精密电子元件的插装、产品质检、机床看护,还是执行包装、注塑件取出等重复性工作,都能出色完成。广东明睿智博机器人科技有限公司提供丰富的应用套件和接口,方便用户快速适配各种末端工具和应用场景,明显缩短自动化项目的投资回报周期,尤其适合多品种、小批量的柔性化生产模式。三坐标协作机器人兼顾多轴精度控制,广东明睿智博为精密检测提供先进设备支持。云南自动锁螺丝机器人解决方案
协作机器人主要特点:协作机器人的主要特点有 :1.轻量化,使机器人更易于控制,提高安全性 。2.友好性,保证机器人的表面和关节是光滑且平整的,无尖锐的转角或者易夹伤操作人员的缝隙 。3.感知能力,感知周围的环境,并根据环境的变化改变自身的动作行为 。4.人机协作,具有敏感的力反馈特性,当达到已设定的力时会立即停止,在风险评估后可不需要安装保护栏,使人和机器人能协同工作 。5.编程方便,对于一些普通操作者和非技术背景的人员来说,都非常容易进行编程与调试 。河北化工行业智能机器人开发智能机器人集成需兼顾系统稳定性与扩展性,广东明睿智博提供一体化集成服务交付。

工作原理:三坐标机器人通过探针在X、Y、Z轴上的移动来接触被测物体,测量系统记录探头的位移量并计算坐标。具体过程如下:坐标系建立:通常采用右手直角坐标系,由X、Y、Z三个轴组成。通过选择一个平滑且稳定的平面作为基准面,设定测量零点,确定测量范围和分辨率。探测系统:包括探针、传感器和图像识别技术。探针用于接触被测物体并获取数据,传感器将信号转化为电信号,图像识别技术对数据进行处理和分析。数据处理:通过计算机程序控制机械臂的移动,实现自动化测量。采集到的数据经过滤波、插值等处理,提高测量精度。
智能路径规划算法是机器人实现复杂任务执行、环境适应与多目标调度的关键技术之一,尤其在动态环境下的应用尤为关键。广东明睿智博在路径算法领域进行了深入研究,构建出具备自适应学习能力的动态路径生成引擎。该算法结合地图建模、目标识别、避障判断与任务优先级管理,可在工况变化、障碍物干扰或突发任务插入时,实时修正路径并优化调度顺序。其已广泛应用于拣选机器人、搬运机器人及仓储AGV等设备,明显提升系统响应速度与资源利用率。此外,该路径算法还支持多设备并行调度,通过集中调度平台实现分工,避免重复路径和拥堵现象。广东明睿智博通过持续优化路径规划算法,有效推动了机器人系统在多样化应用场景中的稳定运行与智能决策。广东明睿智博三坐标协作机器人可与视觉系统高度融合,完成复杂曲面扫描、对位与加工任务。

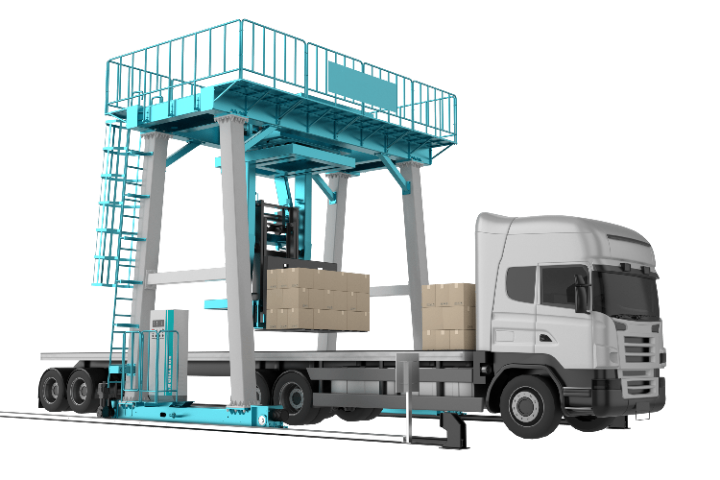
广东明睿智博的装车机器人通过自动化替代人力,明显减少人工和错误成本,为企业提供高性价比的投资回报。这些机器人设计寿命长,维护简便,通过预测性保养减少停机时间,确保长期稳定运行。在成本控制方面,广东明睿智博的设备优化能源使用,降低电费支出,同时提高装车速度,缩短项目周期。企业部署后,能释放资金用于中心业务,增强竞争力。广东明睿智博提供灵活的租赁或购买方案,助力中小企业轻松接入智能技术,推动行业降本增效。广东明睿智博的三坐标协作机器人具备毫米级定位精度,特别适用于精密检测与柔性化装配产线集成。云南自动锁螺丝机器人解决方案
广东明睿智博协作机器人适合中小企业快速导入,提高产线整体柔性与人员协作效率。云南自动锁螺丝机器人解决方案
在精密制造和质量控制领域,对测量精度和效率的要求日益严苛。广东明睿智博机器人科技有限公司的三坐标测量机器人(CMM Robot)将工业机器人的灵活性与精密测量技术相结合,突破了传统固定式三坐标测量机的空间限制。它可以在大型工件周围自由移动,或在生产线上直接进行在线测量,实现数据采集。配备高精度测头和先进的测量软件,能够完成复杂的曲面扫描、尺寸检测、形位公差评定等任务。广东明睿智博机器人科技有限公司的技术确保了测量过程的高重复性和可靠性,其自动化测量单元可集成到智能制造线中,实现生产过程的实时质量监控与闭环控制,是提升产品良率和工艺水平的关键设备。云南自动锁螺丝机器人解决方案